
Why can't I have topics published when running vrpn_client_ros node
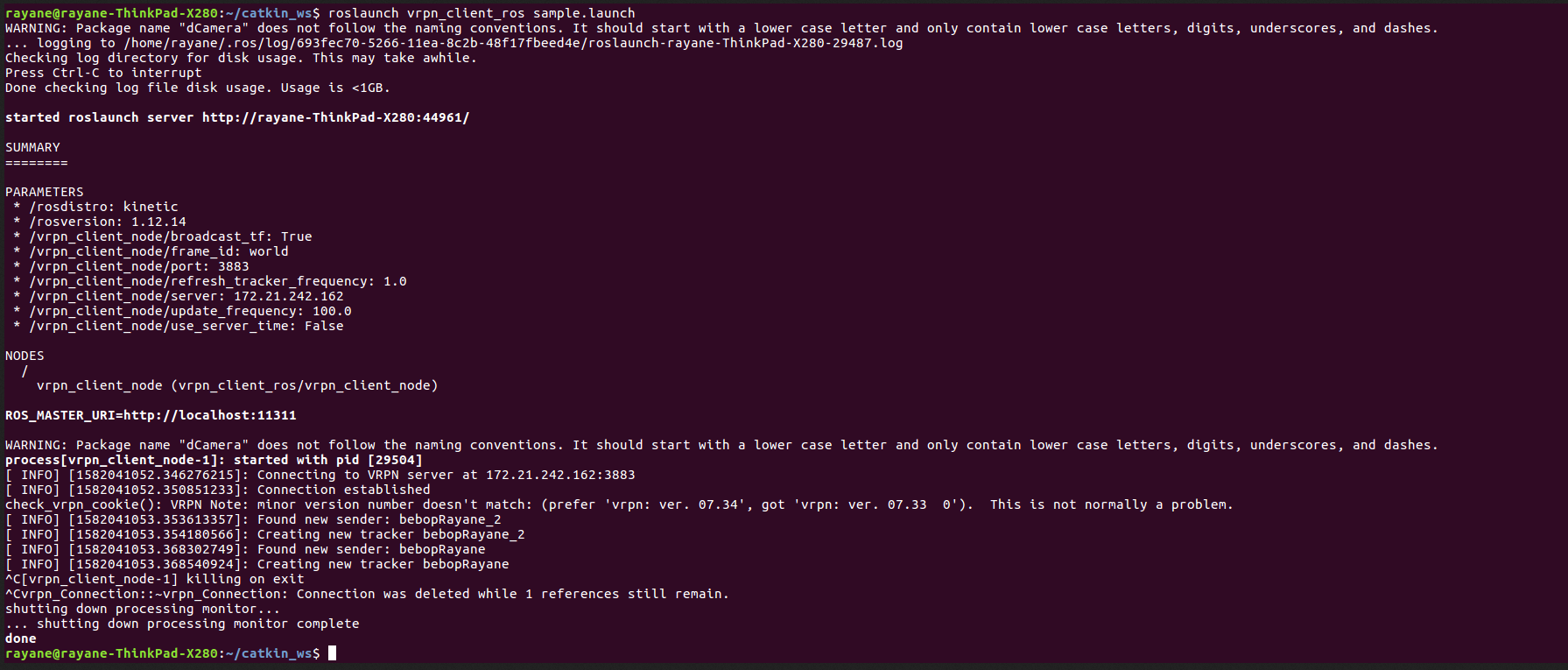
When I connect my lap top to the Vicon tracker and run vrpn_client_node usually I have this (image1 bellow) where it is written found new sender and my object name.
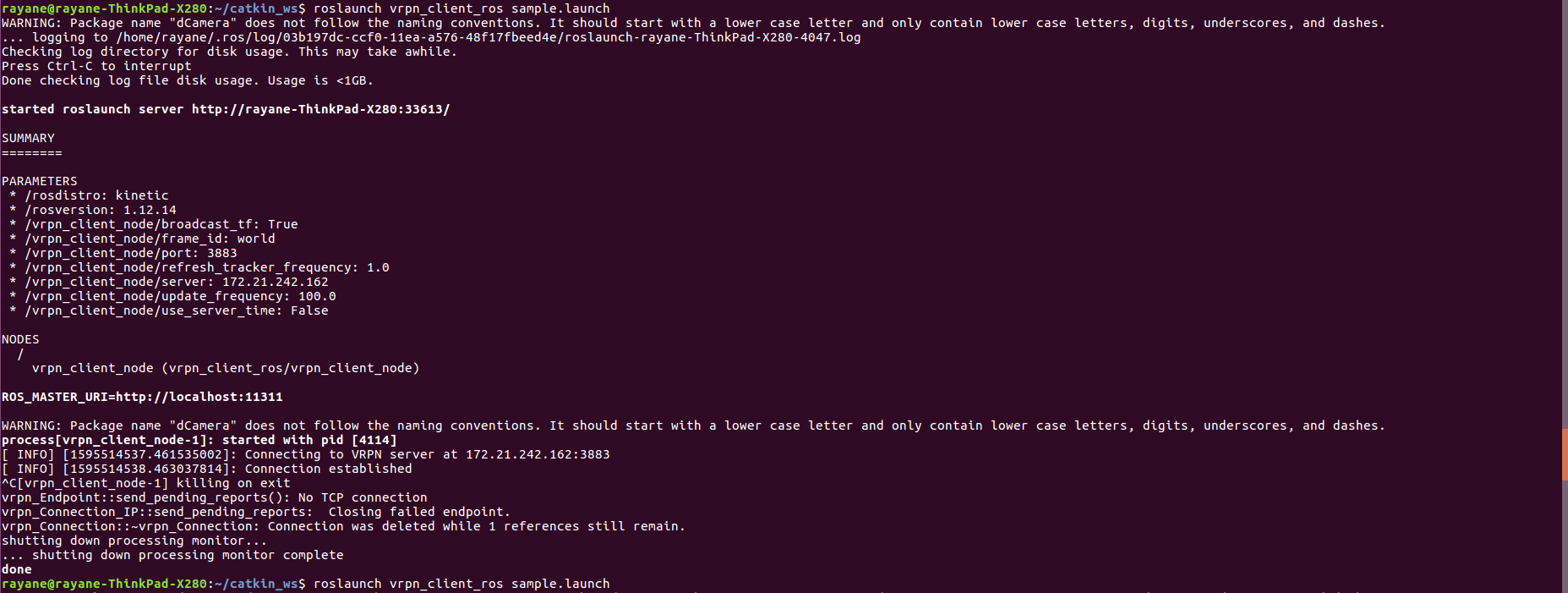
But now I don't know what I did, I am no longer having those lines when I run the node (Image2 bellow)
Any suggestion what I might did wrong!! Thanks

Usually, I face this issue when I'm not on the same network as the mocap system (optitrack in my case) or when the data transmission is disabled on the mocap system.
OK thanks I ll check :)
yeah, they weren't on the same network and I spend the whole afternoon try to find what is the problem thanks for your suggestion