
hector_slam/gmapping with T265 (odometry) and RPLidar
Hello everybody
I am trying to make SLAM using a 2D laser scanner (RPLidar A1) supporting it with a Realsense camera T265, which provides an accurate odometry.
The arrangement of both devices is as follows:
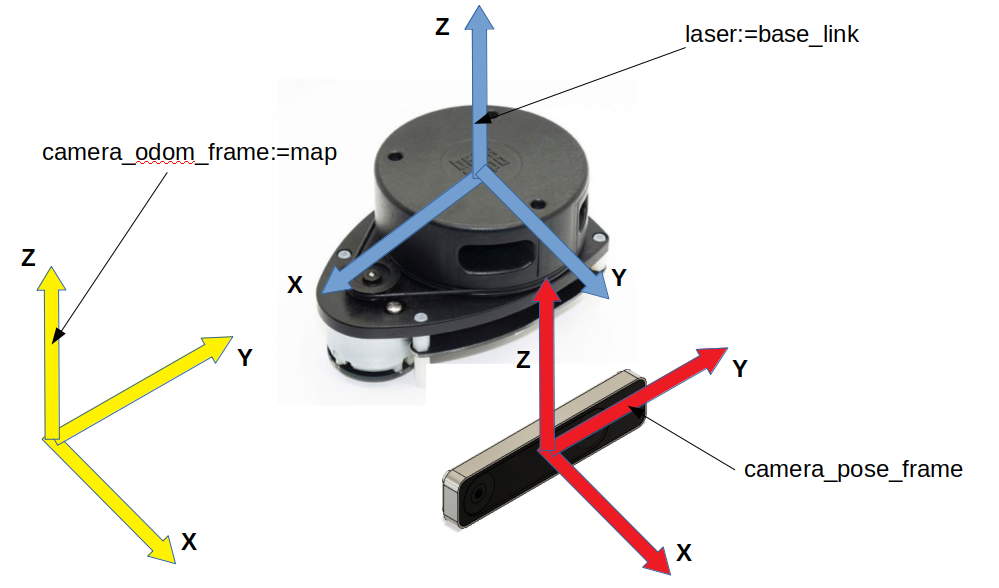
The realsense ROS package provides two main frames: camera_odom_frame and camera_pose_frame. This last one is the one that moves around when the camera moves through the space. This is the tf tree created by the camera package:

I have tried to use these two devices with two SLAM packages: hector_slam and gmapping.
hector_slam
This package works well when carrying out SLAM without odometry. My problem comes when I try to include the odometry information. After launching the LIDAR and the camera packages, I launch hector_slam using the following launch file:
<?xml version="1.0"?>
<launch>
<arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher_frame"/>
<!-- <arg name="base_frame" default="base_footprint"/> -->
<arg name="base_frame" default="base_link"/>
<!-- <arg name="odom_frame" default="nav"/> -->
<arg name="odom_frame" default="camera_odom_frame"/>
<arg name="pub_map_odom_transform" default="true"/>
<arg name="scan_subscriber_queue_size" default="5"/>
<arg name="scan_topic" default="scan"/>
<arg name="map_size" default="2048"/>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="$(arg map_size)"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.06" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="$(arg scan_subscriber_queue_size)"/>
<param name="scan_topic" value="$(arg scan_topic)"/>
<!-- Debug parameters -->
<!--
<param name="output_timing" value="false"/>
<param name="pub_drawings" value="true"/>
<param name="pub_debug_output" value="true"/>
-->
<param name="tf_map_scanmatch_transform_frame_name" value="$(arg tf_map_scanmatch_transform_frame_name)" />
</node>
<node pkg="tf" type="static_transform_publisher" name="map_to_camera_odom_broadcaster" args="0 0 0 0 0 0 map camera_odom_frame 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_to_camera_broadcaster" args="0 0.05 -0.10 3.1415/2 0 0 base_link camera_pose_frame 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 base_link laser 100"/>
</launch>
Note the tf nodes launched at the end of the file. This launcher throws this error:
[ERROR] [1591184110.747014370]: Transform failed during publishing of map_odom transform: Could not find a connection between 'camera_odom_frame' and 'base_link' because they are not part of the same tree.Tf has two or more ...

no access to your google drive to see TF trees - that may be an issue on my side but I've never run into before using these forums.
I upvoted the post so you may now have the karma needed to post TF trees directly.
Great, thanks!