
Is Autoware.auto missing a transform from lidar_front -> base_link?
I have autoware.auto + LGSVL simulator running based on these instructions.
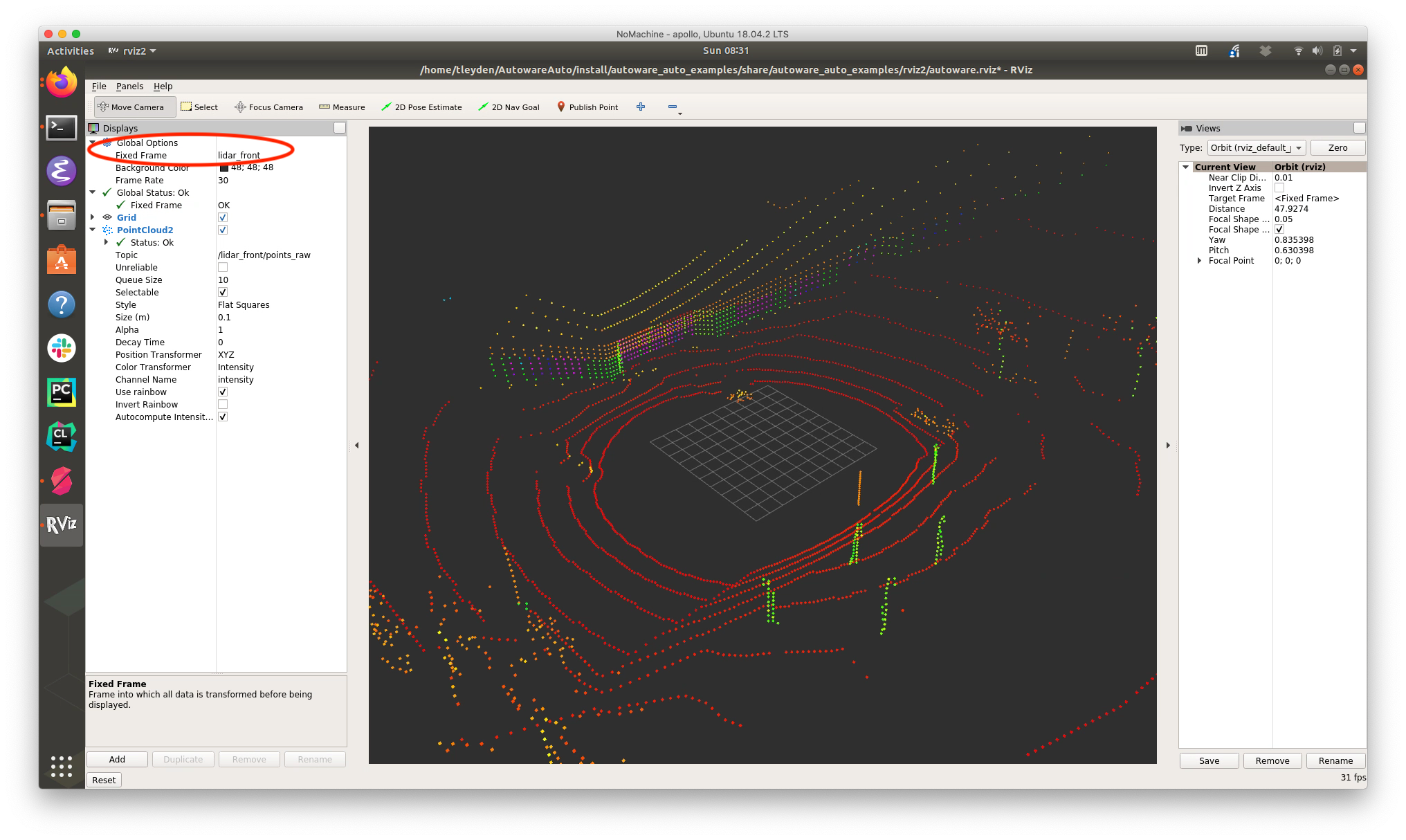
When trying to get the lidar data showing in rviz2 based on the Running the Autoware.Auto 3D perception stack
documentation and launching rviz2 with the autoware_auto_examples/share/autoware_auto_examples/rviz2/autoware.rviz parameter, I needed to run this additional step to get the lidar point cloud to show in rviz2:
$ ros2 run tf2_ros static_transform_publisher 1.42849 -0.017811 1.4802 0.0215759 0.125004 0.111496 lidar_front base_link
And I also had to change the "fixed_frame" to lidar_front:
Without that step, I was getting this error in rviz2:
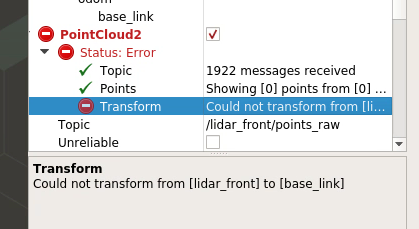
Should this transform from base_link -> lidar_front coordinates already be published by something in the autoware.auto stack itself rather than having to run it manually? Or am I not running some autoware.auto node that I should be? (note that running the ros2 run velodyne_node velodyne_cloud_node_exe didn't seem to make any difference here)

Will this recent change improve the situation? https://gitlab.com/autowarefoundation...