
Issues with localization and unable to use the RVIZ 2D Pose Estimate in Autoware
Hello all,
I am following the steps here to do a simulation with LGSVL simulator. The tutorial say this:
Click "Map" to load the launch file pertaining to the HD maps. An "Ok" should appear to the right of the "Ref" button when successfully loaded. Then click "Sensing" which also launches rosbridge.
1. Run the LGSVL simulator
2. Create a Simulation choosing BorregasAve map and Jaguar2015XE (Autoware) or another Autoware compatible vehicle.
3. Enter localhost:9090 for the Bridge Connection String.
4. Run the created Simulation
5. A vehicle should appear in Borregas Ave in Sunnyvale, CA.
In the Autoware Runtime Manager, continue loading the other launch files - click "Localization" and wait for the time to display to the right of "Ref".
Then click "Rviz" to launch Rviz - the vector map and location of the vehicle in the map should show.
The vehicle may be mis-localized as the initial pose is important for NDT matching. To fix this, click "2D Pose Estimate" in Rviz, then click an approximate position for the vehicle on the map and drag in the direction it is facing before releasing the mouse button. This should allow NDT matching to find the vehicle pose (it may take a few tries). Note that the point cloud will not show up in rviz until ndt matching starts publishing a pose.
Following these steps, I loaded the launch files for Map and an OK button appeared. After clicking Sensing, I created the simulated environment with a car appearing as mentioned in step 5 as shown here
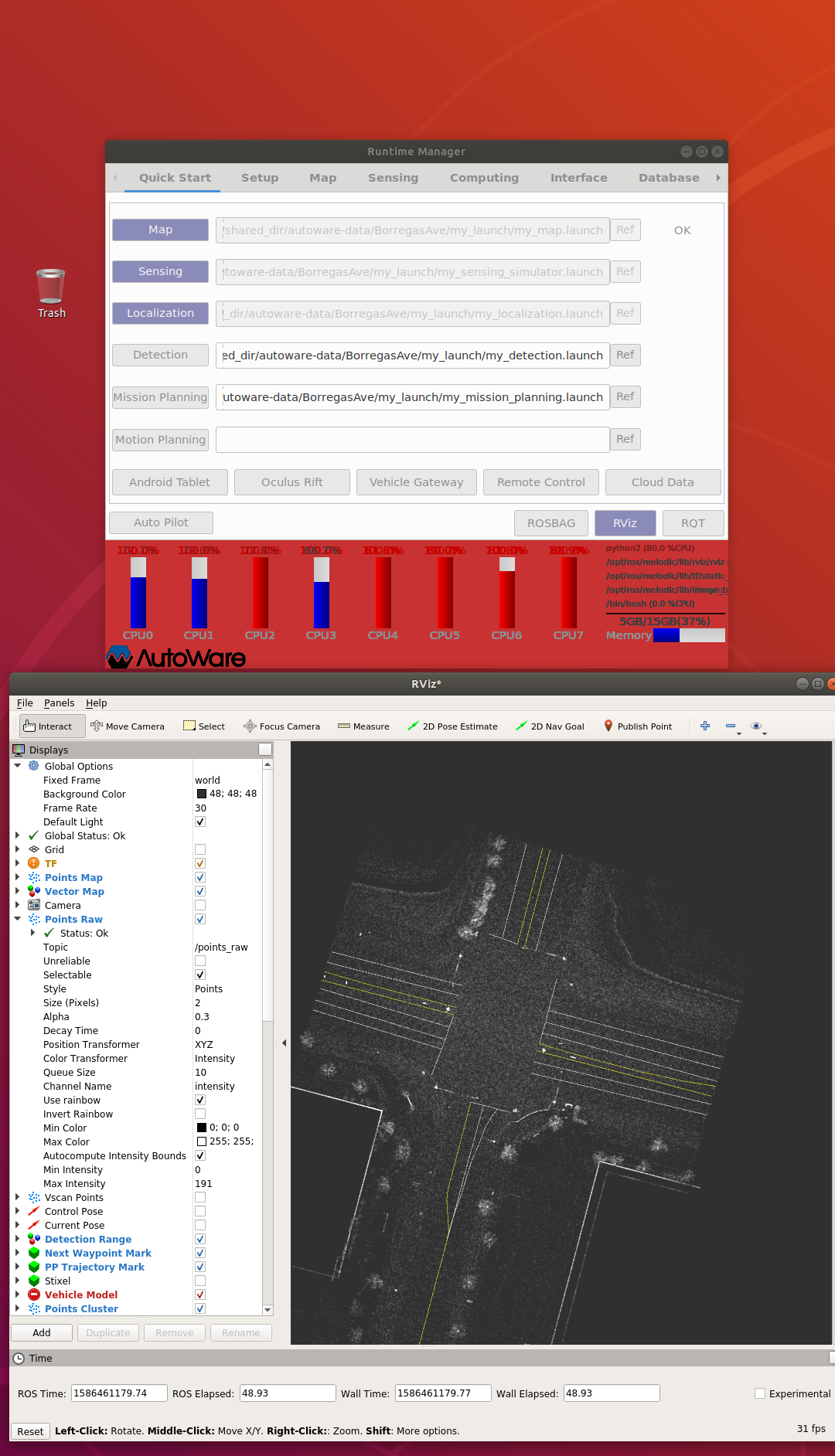
Next I clicked on the Localization button and waited for the time to display. I did not see a time being displayed even after 10 minutes. A snapshot of ARM is here.

I moved onto next step and opened RVIZ. I was able to see this as shown here.
Now as per the tutorial, I am trying to draw the 2D Pose Estimate but nothing is working. I tried a lot of times to see if it works. But nothing happens (a car doesn't appear after drawing the arrow).
Here are the details of how I am running the Autoware. I am running Autoware on docker by running this command:
./run.sh -t 1.12.0
After the docker is loaded, I am getting this:
Using options:
ROS distro: melodic
Image name: autoware/autoware
Tag prefix: 1.12.0
Cuda support: on
Pre-release version: off
UID: <1000>
nvidia-docker is /usr/bin/nvidia-docker
Launching autoware/autoware:1.12.0-melodic-cuda
To run a command as administrator (user "root"), use "sudo <command>".
See "man sudo_root" for details.
And this is my RVIZ version:
[ INFO] [1586584474.758540243]: rviz version 1.13.7
[ INFO] [1586584474.758588550]: compiled against Qt version 5.9.5
[ INFO] [1586584474.758601809]: compiled against OGRE version 1.9.0 (Ghadamon)
Please help me on where I am making the mistake. Thank you!

