
Problem with Stereo ORB SLAM2 in ROS Creating Strange Transformations
Hi,
I have recently started trying to use the ROS implementation of ROS ORB SLAM2 but have encountered an issue with it being very inaccurate and imprecise on the transformations. There are no warnings or errors that arise and all my tests so far have been in a simulated environment. I am using ROS melodic and have this specific package installed. Below I have a picture of what happens when I drive straight and the second one is when I turn in one spot. The tracking seems to be fine but the actual path it believes the robot is taking isn't even close as motion seems to be way off and unpredictable in all 3 axes. I tried using some of the default settings file and the one that includes everything tuned for my simulation environment and they both exhibit the same results. From the debug image everything looks normal and plenty of points are being tracked.
After moving in a straight line I get the following:
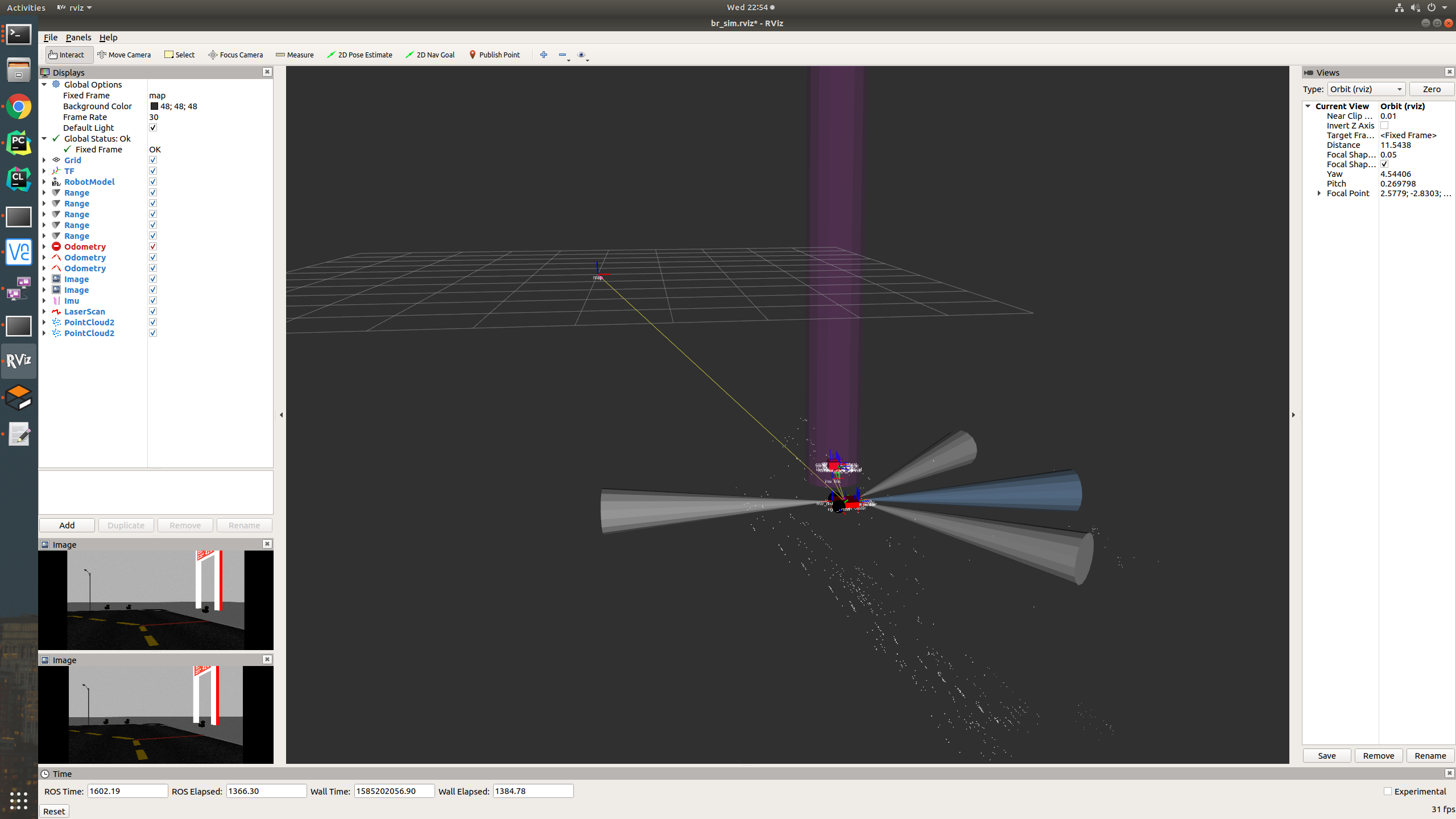
I reset the map and rotated the robot slowly on point and got the following:

Here are the contents of my settings.yaml file for the stereo camera configuration:
Camera.fx: 762.7249337622711 Camera.fy: 360.5 Camera.cx: 640.5 Camera.cy: 0.0 Camera.k1: 0.0 Camera.k2: 0.0 Camera.p1: 0.0 Camera.p2: 0.0 Camera.width: 1280 Camera.height: 720 Camera.fps: 15.0 Camera.bf: 152.54498675245424 Camera.RGB: 1 ThDepth: 35 LEFT.height: 720 LEFT.width: 1280 LEFT.D: !!opencv-matrix rows: 1 cols: 5 dt: d data: [0.0, 0.0, 0.0, 0.0, 0.0] LEFT.K: !!opencv-matrix rows: 3 cols: 3 dt: d data: [762.7249337622711, 0.0, 640.5, 0.0, 762.7249337622711, 360.5, 0.0, 0.0, 1.0] LEFT.R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0] LEFT.P: !!opencv-matrix rows: 3 cols: 4 dt: d data: [762.7249337622711, 0.0, 640.5, -152.54498675245424, 0.0, 762.7249337622711, 360.5, 0.0, 0.0, 0.0, 1.0, 0.0] RIGHT.height: 720 RIGHT.width: 1280 RIGHT.D: !!opencv-matrix rows: 1 cols: 5 dt: d data:[0.0, 0.0, 0.0, 0.0, 0.0] RIGHT.K: !!opencv-matrix rows: 3 cols: 3 dt: d data: [762.7249337622711, 0.0, 640.5, 0.0, 762.7249337622711, 360.5, 0.0, 0.0, 1.0] RIGHT.R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0] RIGHT.P: !!opencv-matrix rows: 3 cols: 4 dt: d data: [762.7249337622711, 0.0, 640.5, -152.54498675245424, 0.0, 762.7249337622711, 360.5, 0.0, 0.0, 0.0, 1.0, 0.0] ORBextractor.nFeatures: 1200 ORBextractor.scaleFactor: 1.2 ORBextractor.nLevels: 8 ORBextractor.iniThFAST: 20 ORBextractor.minThFAST: 7 Viewer.KeyFrameSize: 0.05 ...
