
tf falls into pieces after spawn in Gazebo
Hello,
i am trying to model the so-called vertical plotter (XY plotter) in Gazebo.
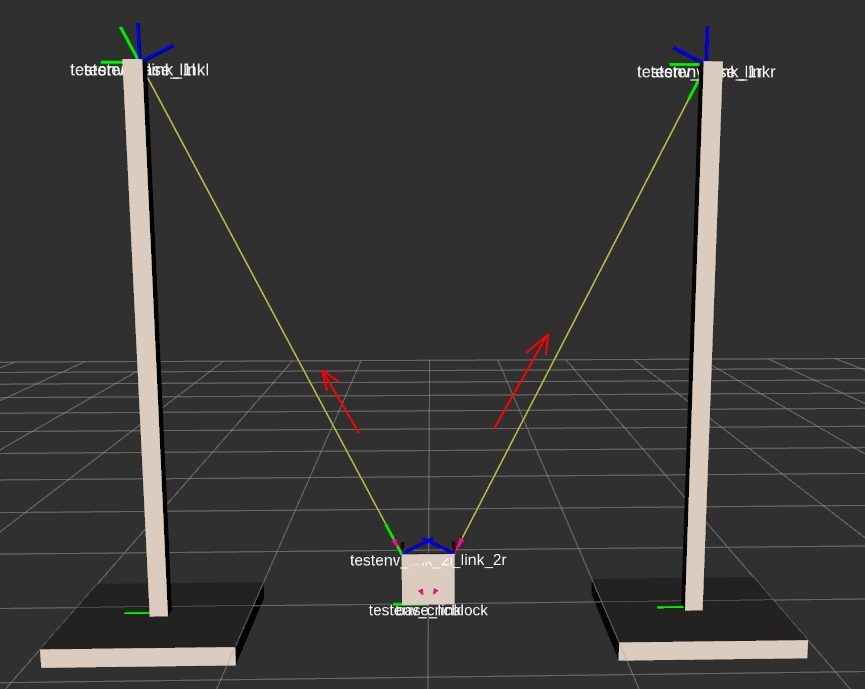
I did create the xacro of the system and it seems OK in RViz (two prismatic joints indicated with red arrows actuate the system; the rest of the joints are passive rotating joints):
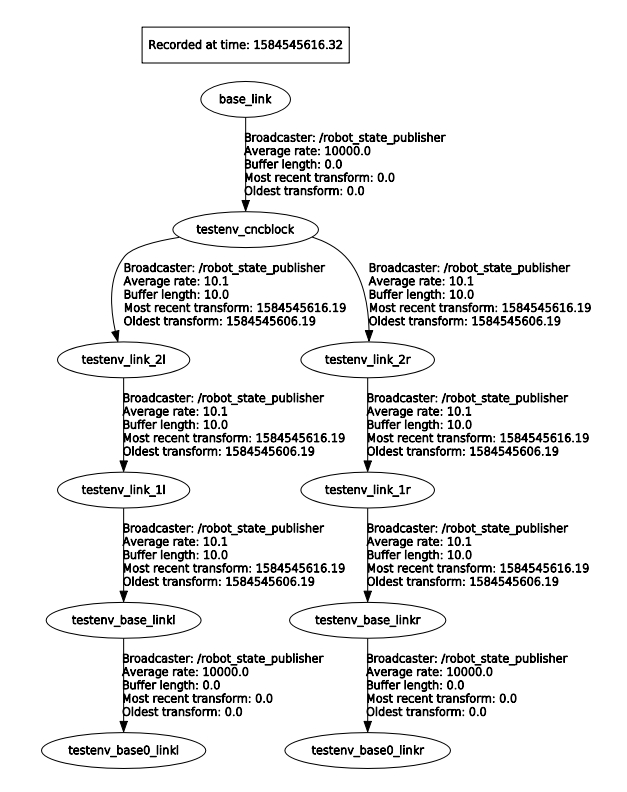
This is the tf of the system:
I observed that after i spawn the model in Gazebo, the tf falls into pieces: 
What can be the problem here? I am still trying to tune the PID parameters of the two effort controllers (connected to the prismatic joints), but i suspect that this is not normal that my system (tf) falls into pieces. Can anyone give some hints?
Thank you.
add a comment
