
missing the frame "map" while running ros_stage
Hi I am using stage to run SLAM simulations.
It is okay to mapping with Gmapping. But It doesn't work with Cartographer
when I run with cartographer by
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=cartographer
the terminal outputs warning of

and

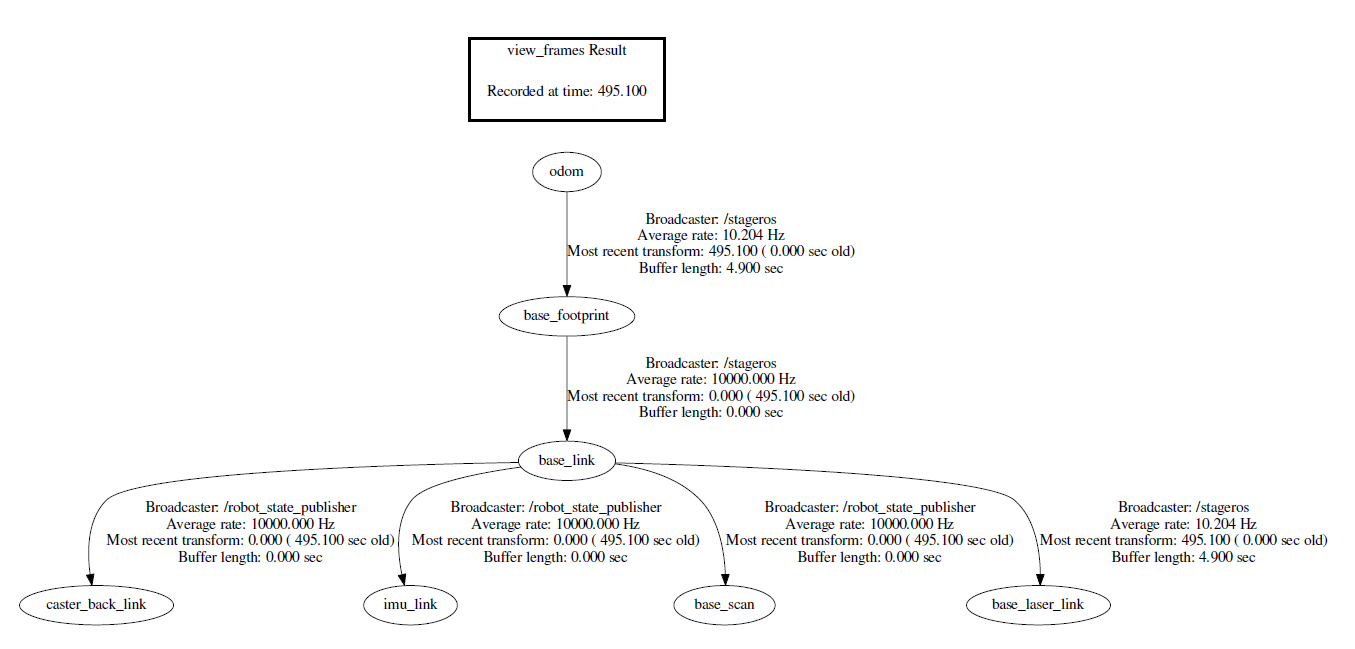
I checked the frame tree of both Gmapping and Cartographer, the cartographer missed the frame of map
I can run the carographer with real environment and with bag file. So I assume the launch file and lua file is correct.
any tips for that? Thank you!
add a comment
