
Mobile Manipulator double urdf?
Hello i have created a educational mobile manipulator costing less than 1000
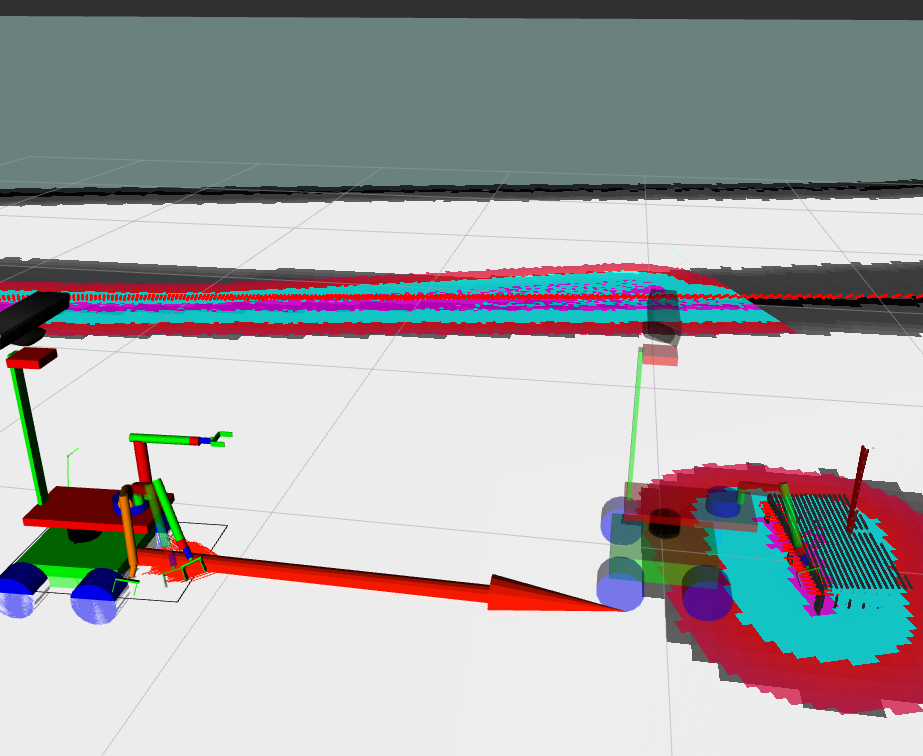
I have some trouble trying to figure out why my arm appears twice in rviz (arm always show in start position), even when the arm has moved, also as you can see the robot model drags behind making a copy
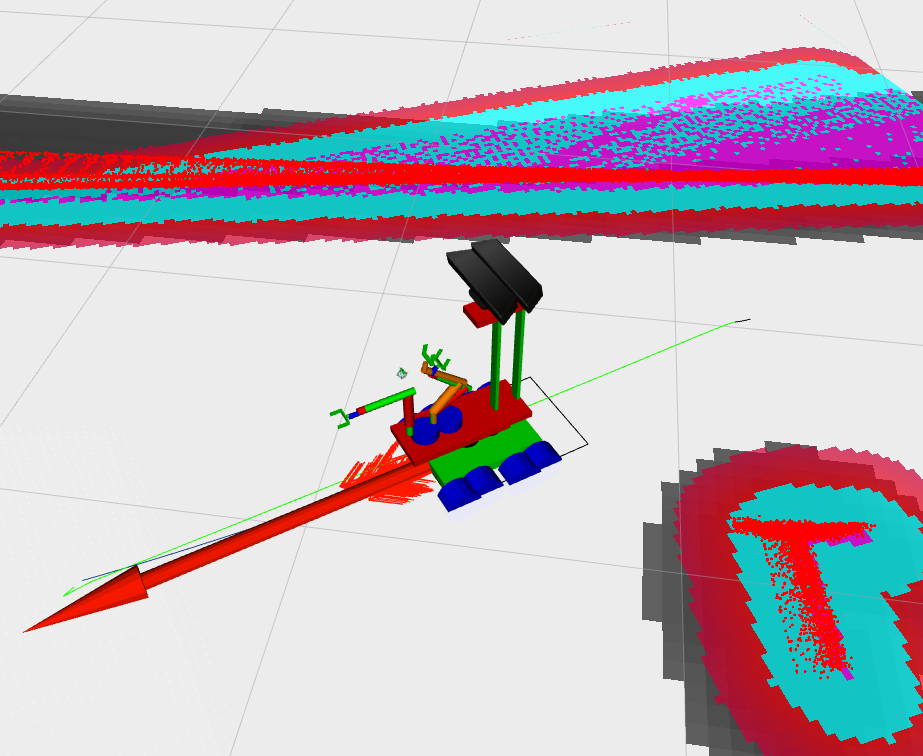
Furthermore when i plan a random valid goal with moveit a ghost robot appears in the start position
I think the problem has something to do with moveit, i dont use joint state publisher, except of that of ros control My virtual joint is (robot footprint)-(link_0 of the arm) type fixed
Please help me find the solution because it's pretty annoying but the robot is functional this way too
To run on kinetic or melodic git clone https://github.com/panagelak/Open_Mob... rosdep install --from-paths src --ignore-src -r -y (to install depedencies from catkin_ws dir) catkin_make
maybe need to install also moveit,amcl,map server, move base
Run the demo
roslaunch lynxbot_bringup main.launch
or
roslaunch lynxbot_bringup sim_bringup.launch (for gazebo+ros controllers)
roslaunch lynxbot_bringup moveit.launch / amcl.launch / move_base.launch
rosrun pcl_obj pcl_main (to detect biggest cylinder and publish tf frame target)
rosrun lynxbot_bringup traj_exec.py (to perform a grasping sequence )
rosrun lynxbot_bringup set_start_pose.py (to move the robot arm)
I have included tf_frames and node graph but nothing weird there
Thanks a lot for your help, i am waiting your advices!!!!

Since you are using move it, I doubt that you have enabled the option of "Show Robot Visual" under the "Scene_robot" menu of motion planning in RViz, just uncheck it and try it. If it is correct, I will update this comment as my answer.
Hello, i uncheck it, didnt change the behaviour at all ^^
Also, you need to do the same under "Planned Path"
when i uncheck it, it doesnt show the movement of the real arm, however it shows the movement in the ghost, and a double arm at right angle probably from the limits of the urdf is just there..