
Mapviz with mavros

Hi, I try to visualise my gps data with mapviz on Melodic I publish with mavros 2 navsat topics (one raw and the other local)
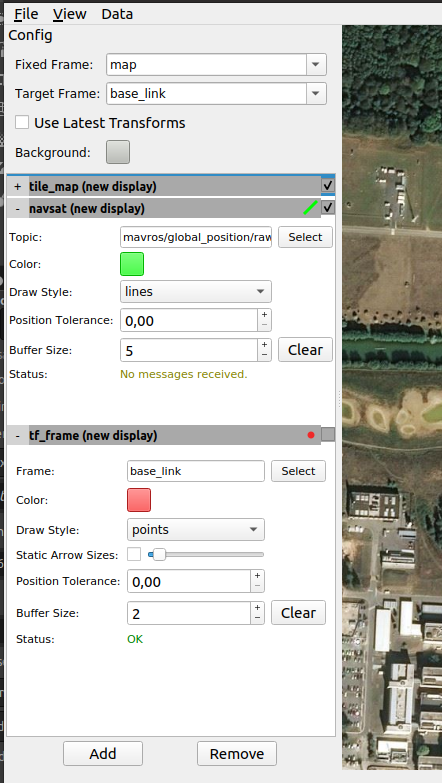
On mapviz, it seems to see the topic but not the publication .
I used this type of launch file and I'm not quite sure to understand the transform with the local origins in it :
<launch>
<node pkg="mapviz" type="mapviz" name="mapviz"></node>
<node pkg="swri_transform_util" type="initialize_origin.py" name="initialize_origin" >
<param name="local_xy_frame" value="/map"/>
<param name="local_xy_origin" value="lac"/>
<rosparam param="local_xy_origins">
[{ name: u2is,
latitude: 48.710907,
longitude: 2.217554,
altitude: 233,
heading: 0.0},
{ name: lac,
latitude: 48.716121,
longitude: 2.212374,
altitude: 233,
heading: 0.0}
]
</rosparam>
</node>
<node pkg="tf" type="static_transform_publisher" name="swri_transform" args="0 0 0 0 0 0 /map /origin 100" />
</launch>
Can someone explain to me the basic usage of mapviz with navsat topics ?
Also my current tf tree :
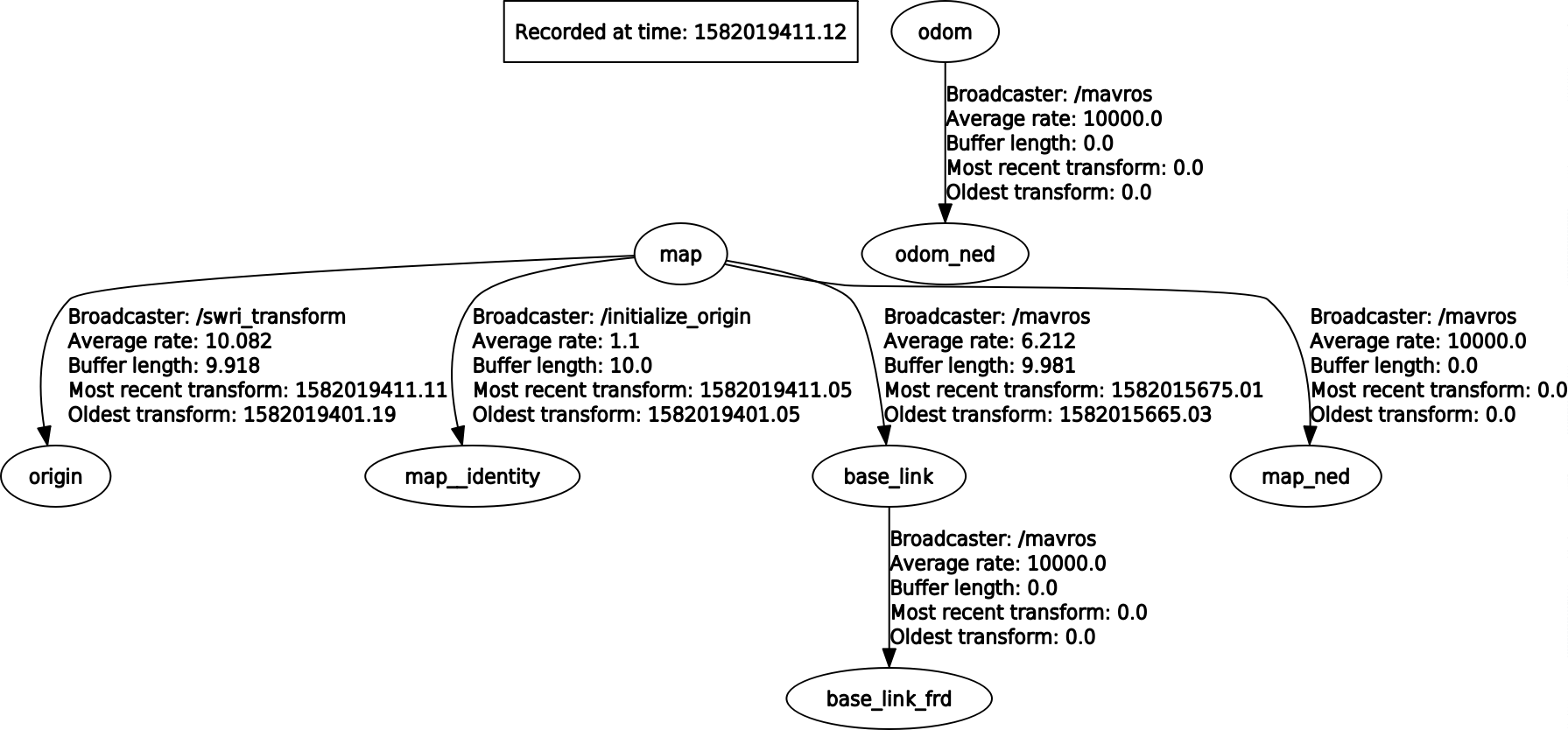
Thanks.

Did you solved the problem?
Hi, sorry for my late answer, I don't remember how I manage to make it work but I think it worked with a good URDF and static_transform_publisher