
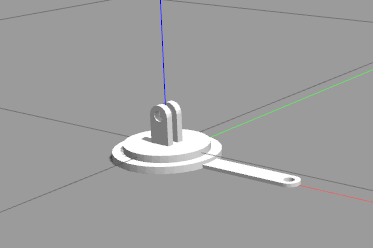
In the gazebo environment, once dynamic parameters are added to the urdf model, the connecting rod will be fixed at the origin.
In the gazebo environment, once dynamic parameters are added to the urdf model, the link will be fixed at the origin.
After adding the dynamics damping,the showed link will be fixed at the origin(or maybe world).
<dynamics damping="0.7"/>
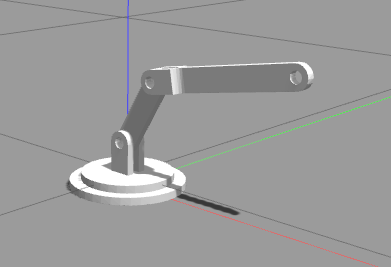
before adding the dynamics damping:
after adding the dynamics damping:
All urde files :
<?xml version="1.0" encoding="utf-8"?>
<!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com)
Commit Version: 1.5.1-0-g916b5db Build Version: 1.5.7152.31018
For more information, please see http://wiki.ros.org/sw_urdf_exporter -->
<!-- Revolute-Revolute Manipulator -->
<robot name="link" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- Import all Gazebo-customization elem
ents, including Gazebo colors -->
<xacro:include filename="$(find link)/urdf/link.gazebo" />
<!-- Used for fixing robot to Gazebo 'base_link' -->
<link name="world"/>
<joint name="fixed" type="fixed">
<parent link="world"/>
<child link="base_link"/>
</joint>
<link
name="base_link">
<inertial>
<origin
xyz="5.41431391044674E-19 -3.81599768090245E-18 0.0119651355617924"
rpy="0 0 0" />
<mass
value="0.317346214028947" />
<inertia
ixx="0.000400193890599361"
ixy="-3.73238496454284E-22"
ixz="-4.8058493695367E-21"
iyy="0.000399358915837397"
iyz="-4.57713225377642E-20"
izz="0.000705715767674914" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://link/meshes/base_link.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://link/meshes/base_link.STL" />
</geometry>
</collision>
</link>
<link
name="link1">
<inertial>
<origin
xyz="0.05 1.04083408558608E-17 0"
rpy="0 0 0" />
<mass
value="0.0335342917352885" />
<inertia
ixx="2.87735927381987E-06"
ixy="2.32934060494933E-21"
ixz="2.30346855521167E-22"
iyy="3.89630886120412E-05"
iyz="1.52906451041926E-23"
izz="4.12815430236062E-05" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://link/meshes/link1.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://link/meshes/link1.STL" />
</geometry>
</collision>
</link>
<joint
name="joint1"
type="continuous">
<origin
xyz="0 0 0.06"
rpy="-1.5708 -1.033 0" />
<parent
link="base_link" />
<child
link="link1" />
<axis
xyz="0 0 -1" />
<dynamics damping="0.7"/>
</joint>
<link
name="link2">
<inertial>
<origin
xyz="0.0847185207825683 -7.7715611723761E-16 -5.85317276699049E-18"
rpy="0 0 0" />
<mass
value="0.0777109513774519" />
<inertia
ixx="9.11722126446958E-06"
ixy="6.56450534122083E-21"
ixz="2.83871210352196E-21"
iyy="0.0003324057043755"
iyz="7.17448377804427E-22"
izz="0.000335193630705286" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://link/meshes/link2.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
< ...
I would perhaps recommend to ask this over at
answers.gazebosim.org, seeing as you're attempting to make this work in Gazebo.