
Different tf tree while running the bagfile from start and middle
So, I have this wierd bug that, whenever I tried to play this particular bagfile from the start then I have all the correct tf frames present in the tf tree, but when I tried to play the bagile from the middle then certain tf frames got lost.
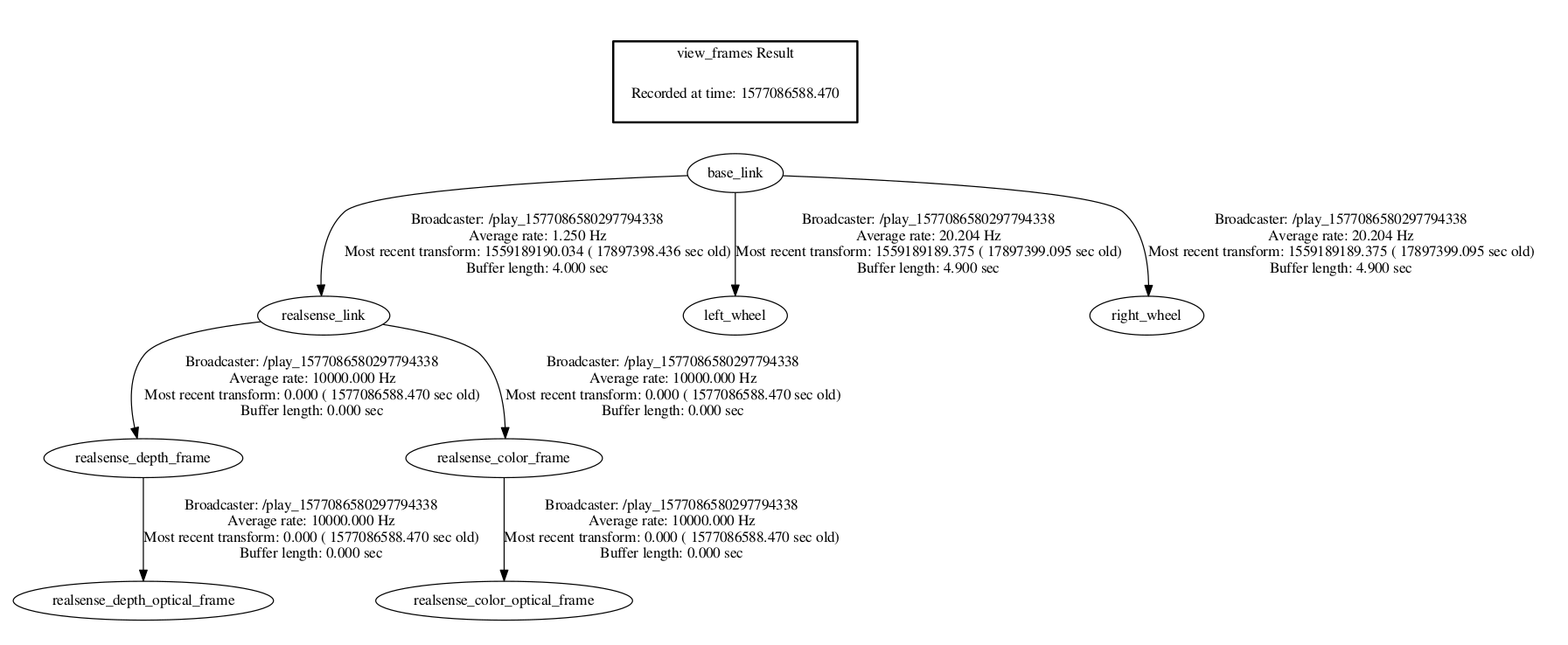
Bagfile played from the start:
Bagfile played from the middle (using rosbag play <bafile> -s 150):
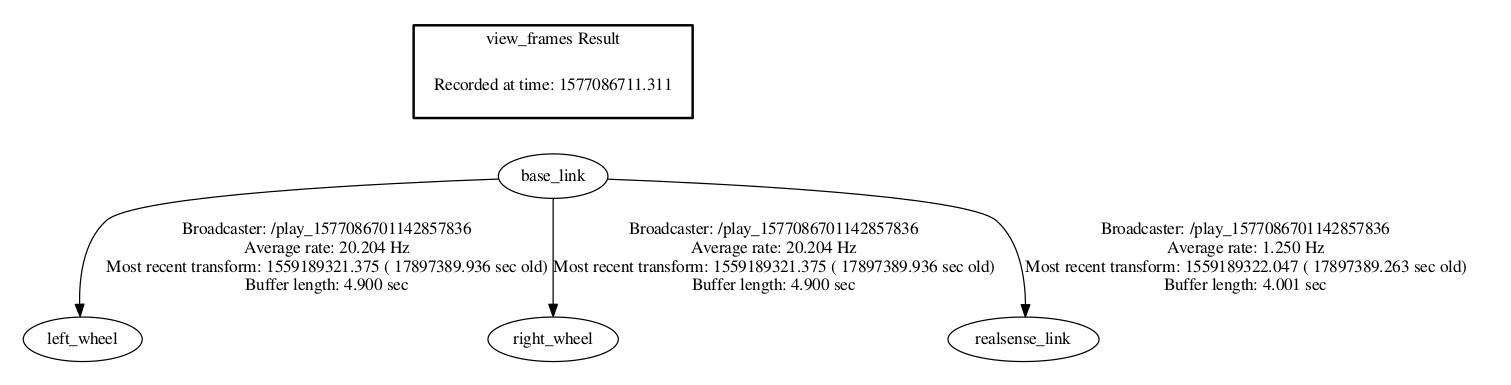
So I wanted to know why the frames below realsense link got lost when playing the bagfile from the middle? Is it particular to the bagfile recorded (I got the bagfile from the client I am working for) or some rosbag bug?
add a comment

