
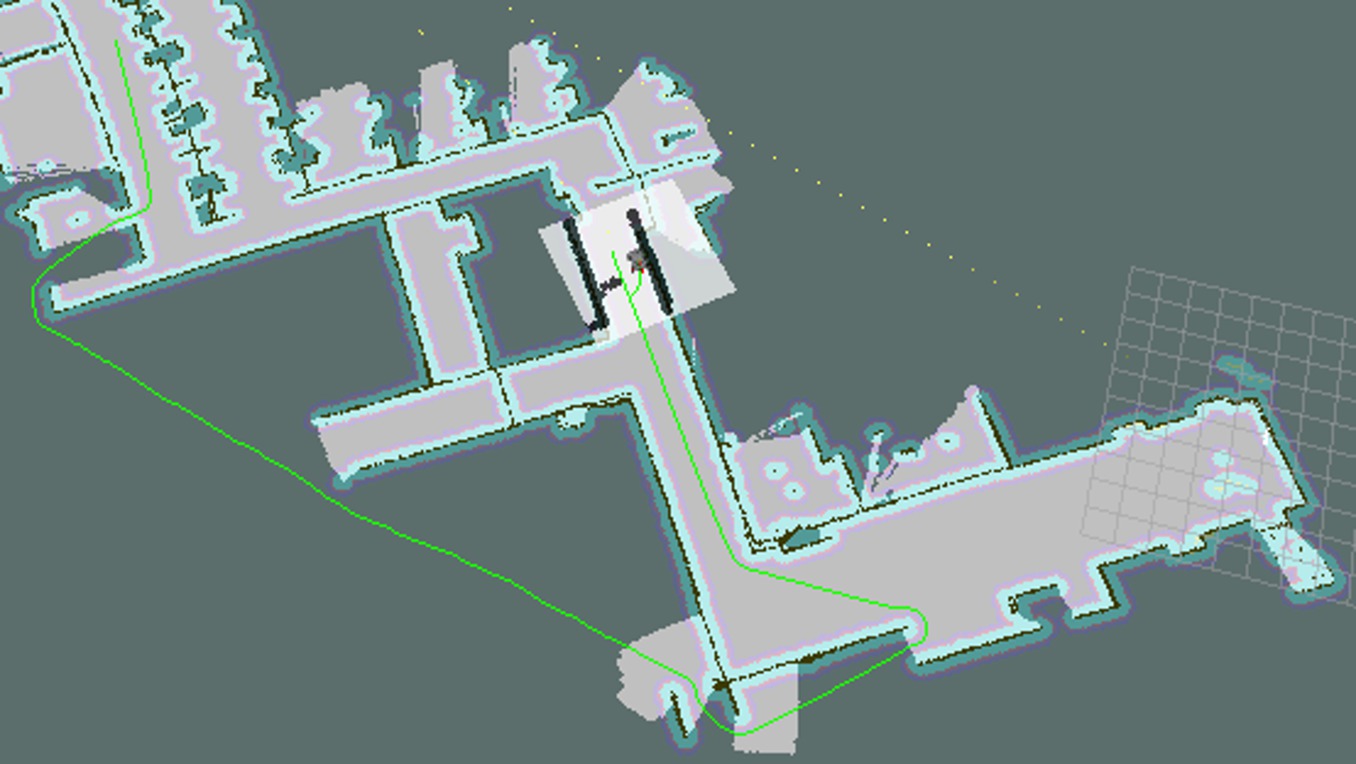
Path planned through unmapped region for goal present inside map.
could someone explain why sometines the global path planned by the robot for navigation ventures into the unmapped region?
Images of the path planned to the goal are attached below.
The planned path is in green.
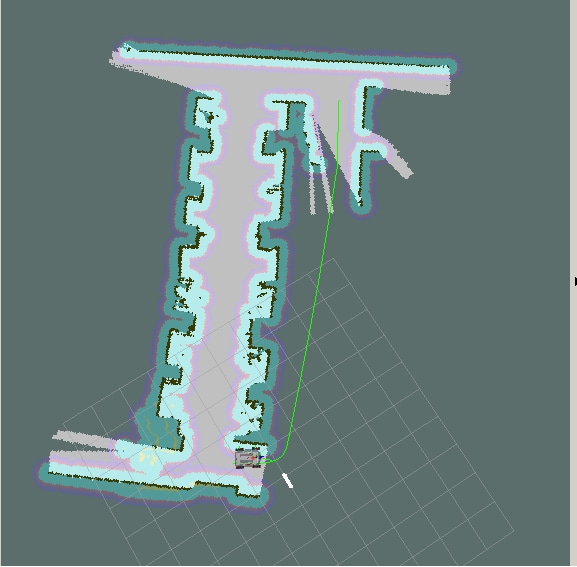
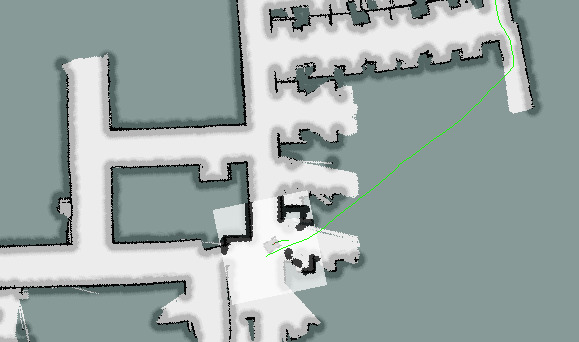
Through normal understanding, the global planner plans the shortest path in the mapped region and wouldn't traverse the unmapped region even if the goal point appears much closer through this.
Is there a way to correct this apart from editing the map?
Global planner : NavfnROS
Local planner : TrajectoryPlannerROS
OS: Ubuntu 14.04. ROS: Indigo.
Thank you.
Edit:
add a comment
