
rviz's visualization of rotational elements of a co-variance matrix difficult to interpret
Hello,
I have a problem in how to interpret rviz's visualization of co-variance matrix in PoseWithCovariance.
Visualization of translational elements (row:0~2, column:0~2) of co-variance matrices seems quite fine (purple-ish elliptic ball).
However, rviz's visualization of rotational elements of co-variance matrices (row:3~5, column:3~5)
appears weird to me.
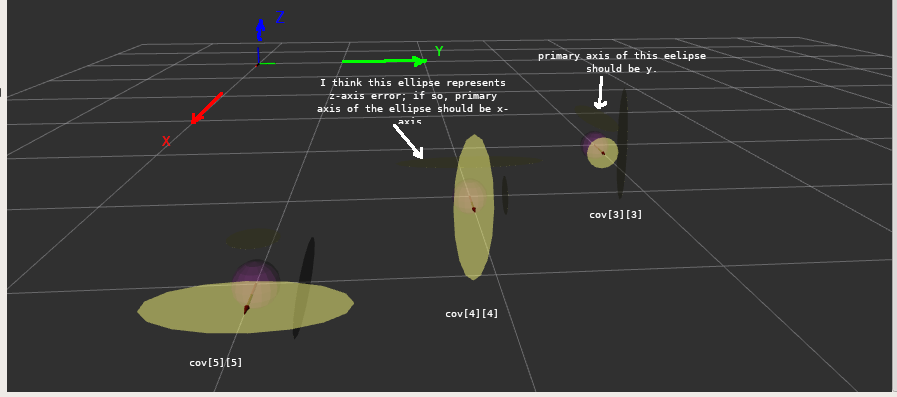
I believe three yellowish elliptic plates correspond to the error magnitude of orientation frame axes (x axis, y axis and z axis) caused by rotational error.
If so,
- yaw noise should cause errors in x axis to direction of y and errors in y axis to direction of x : --> all ellipses attached to
cov[5][5]appear good. - pitch noise should cause errors in z axis to direction of x and errors in x axis to direction of z : --> ellipse for z-axis seems weird (
cov[4][4]). - roll noise should cause errors in y axis to direction of z and errors in z axis to direction of y : --> ellipse for y-axis seems weird (
cov[3][3]).
I would be pleased if anyone knowledgeable in rviz give me some explanation on this phenomenon.
[ Co-variance Matrices ]
| 0.25 0 0 0 0 0 |
cov[3][3] = | 0 0.25 0 0 0 0 |
| 0 0 0.25 0 0 0 |
| 0 0 0 1.25 0 0 | # variance of roll noise is larger
| 0 0 0 0 0.25 0 |
| 0 0 0 0 0 0.25 |
| 0.25 0 0 0 0 0 |
cov[4][4] = | 0 0.25 0 0 0 0 |
| 0 0 0.25 0 0 0 |
| 0 0 0 0.25 0 0 |
| 0 0 0 0 1.25 0 | # variance of pitch noise is larger
| 0 0 0 0 0 0.25 |
| 0.25 0 0 0 0 0 |
cov[5][5] = | 0 0.25 0 0 0 0 |
| 0 0 0.25 0 0 0 |
| 0 0 0 0.25 0 0 |
| 0 0 0 0 0.25 0 |
| 0 0 0 0 0 1.25 | # variance of yaw noise is larger
[ Visualization by rviz ]

[ System that I used ]
- rviz: version 1.13.5
- ROS: melodic
- OS: Ubuntu 18.04.3 LTS
- Hardware: Lenovo ThinkPad X250
Thanks.

You cannot link to images hosted off-site. They will not render.
Please attach your images directly to the question, I've given you sufficient karma for that.
Hi gvdhoorn,
I directly attached images. Thank you for assisting me on this.