
rtabmap_ros 3D map PointCloud2 transfer ROS Master_Slave
Dear people.
I do have the following devices:
- JetsonTX2
- Pixhawk 4 mini
- ZED stereo vision system
- A ThinkPad laptop
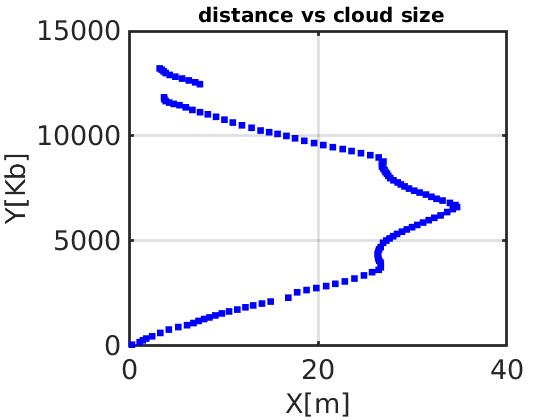
I do have setup a ROS master slave system. The Jetson is taken as a master and the laptop is taken as a slave. Both communicates over wireless. I am measuring the size of the transmited topic /zed/rtabmap/cloud_map . In the following picture shows how the size of the cloud is growing with the distance. It seems to be as if the whole cloud of the 3D map is transmitted as it grows. I am using rtabmap.launch
<group ns="/zed/">
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
</include>
</group>
Just wondering if there is a parameter that allows to transmit the changes and not the whole cloud.
Any help I appreciate it.
add a comment

