
how to eliminate robot's parts from lidar data?
I have turtlebot3 waffle model and lidar in the center.
And I have four vertical rods around lidar
And I have laser data about them.
you see, there is 4 points that indicates these 4 rods.
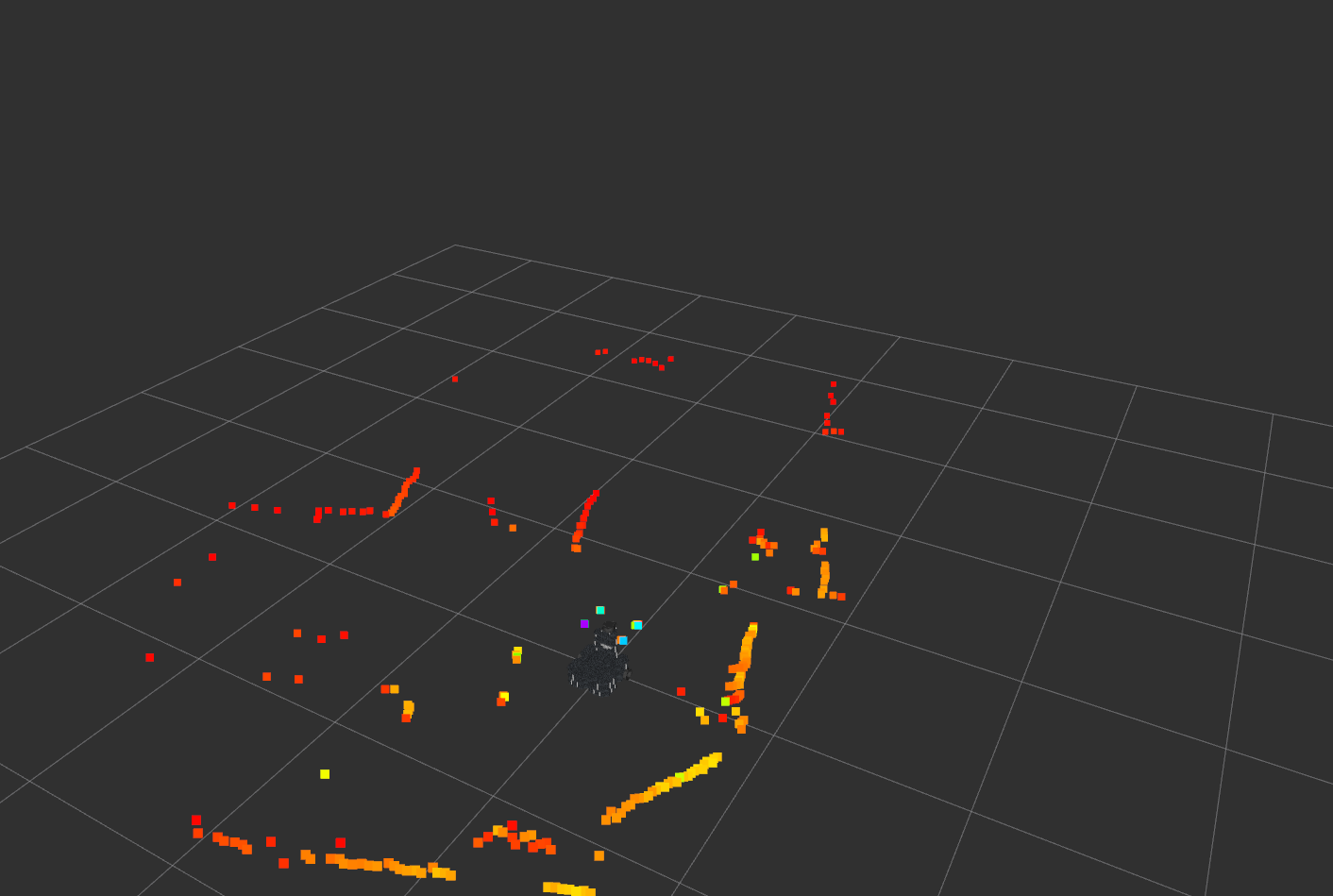
So, how can I filter this data in laserscan?


The simplest way I see would be to just filter scans with ranges below the size of the robot
you mean writing a script?
No need to write script: http://wiki.ros.org/laser_filters
ok, I found that hector (slam method) have parameter laser_min_distance. So, I think, it helps to not take into account this points while building map.
but what about gmapping and rtabmap?