
Integrate 3D sensing in robot_localization package
Hi,
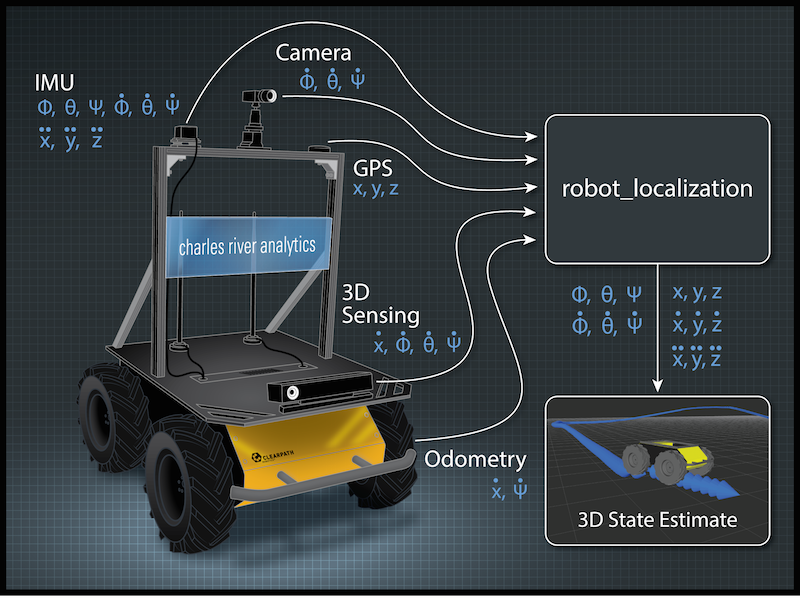
I came across of this image of the robot_localization package, and I wonder if it is possible to integrate in the sensor fusion the 3D sensing data like in the picture. I didn't find anything about incorporating 3D sensing data in the documentation of this package.
Best,
add a comment
