
blank bars in depth image viewer using kinect [closed]
I have now have electric from diamondback thinking this would solve the problem.
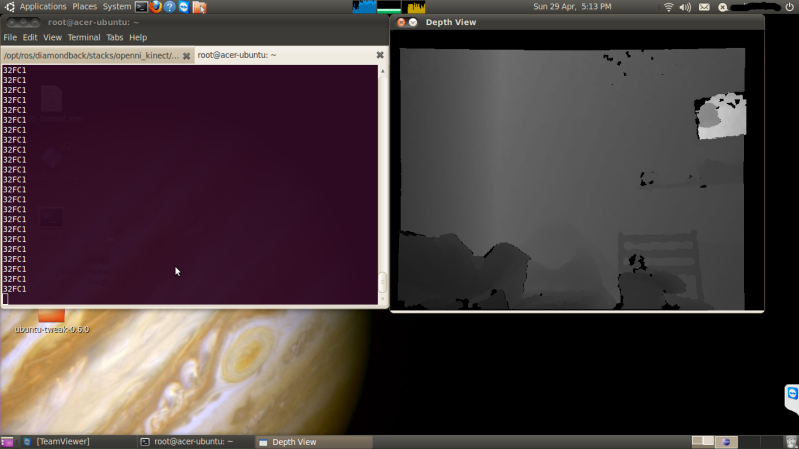
I have a black bars on the left, top and right of the depth image.
This is what I ran:
`roslaunch openni_camera openni_node.launch`
rosrun depth_viewer depth_viewer
depth viewer uses the /camera/depth/image topic. When I run it I get this
Here is the list of running topics
/camera/depth/camera_info
/camera/depth/disparity
/camera/depth/image
/camera/depth/image/compressed
/camera/depth/image/compressed/parameter_descriptions
/camera/depth/image/compressed/parameter_updates
/camera/depth/image/theora
/camera/depth/image/theora/parameter_descriptions
/camera/depth/image/theora/parameter_updates
/camera/depth/image_raw
/camera/depth/image_raw/compressed
/camera/depth/image_raw/compressed/parameter_descriptions
/camera/depth/image_raw/compressed/parameter_updates
/camera/depth/image_raw/theora
/camera/depth/image_raw/theora/parameter_descriptions
/camera/depth/image_raw/theora/parameter_updates
/camera/depth/points
/camera/rgb/camera_info
/camera/rgb/image_color
/camera/rgb/image_color/compressed
/camera/rgb/image_color/compressed/parameter_descriptions
/camera/rgb/image_color/compressed/parameter_updates
/camera/rgb/image_color/theora
/camera/rgb/image_color/theora/parameter_descriptions
/camera/rgb/image_color/theora/parameter_updates
/camera/rgb/image_mono
/camera/rgb/image_mono/compressed
/camera/rgb/image_mono/compressed/parameter_descriptions
/camera/rgb/image_mono/compressed/parameter_updates
/camera/rgb/image_mono/theora
/camera/rgb/image_mono/theora/parameter_descriptions
/camera/rgb/image_mono/theora/parameter_updates
/camera/rgb/image_raw
/camera/rgb/image_raw/compressed
/camera/rgb/image_raw/compressed/parameter_descriptions
/camera/rgb/image_raw/compressed/parameter_updates
/camera/rgb/image_raw/theora
/camera/rgb/image_raw/theora/parameter_descriptions
/camera/rgb/image_raw/theora/parameter_updates
/camera/rgb/points
/openni_node1/parameter_descriptions
/openni_node1/parameter_updates
/rosout
/rosout_agg
/tf

{kind=link}
weird. try viewing /camera/depth/image using rviz and see what you get.