
Why doesn't slam_gmapping sometimes update?

Hi
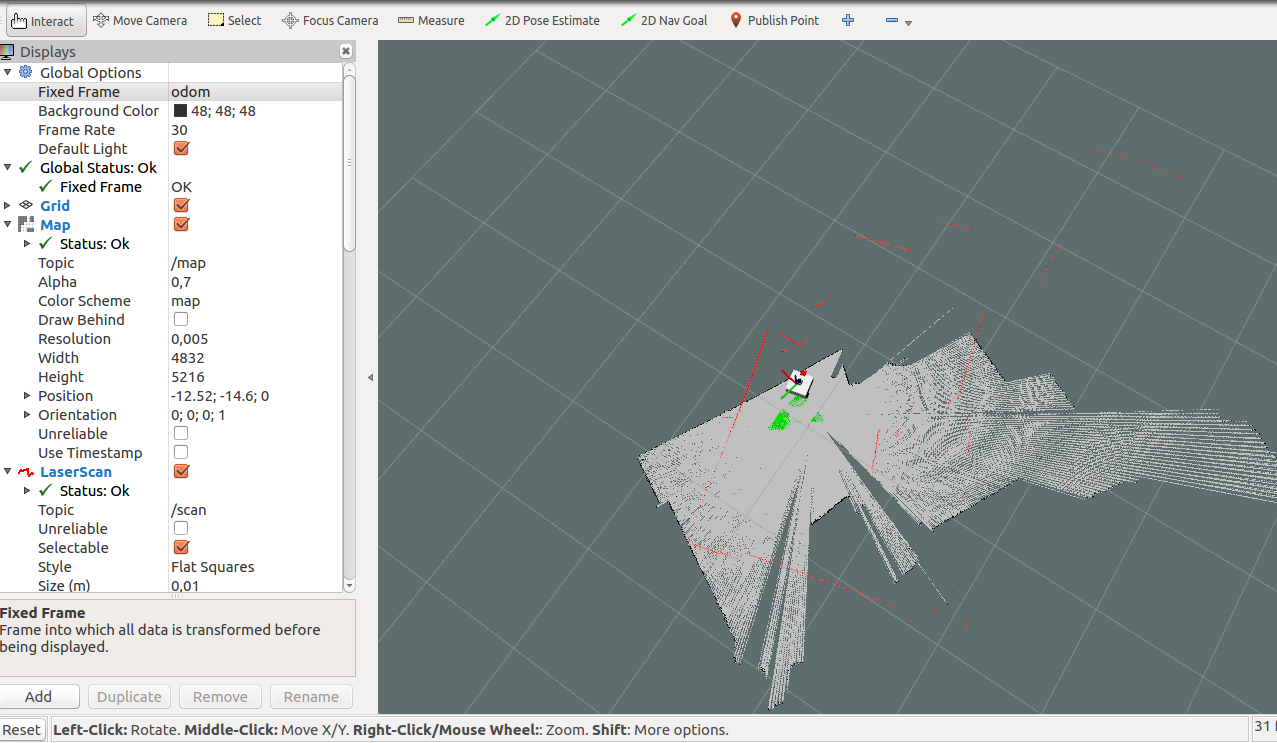
Why does slam_gmapping sometimes not update after a series of small movements (forward, backward, rotate left and rotate right)? Even if it is stationary for a long time, the map is not updated.
Example:
add a comment
