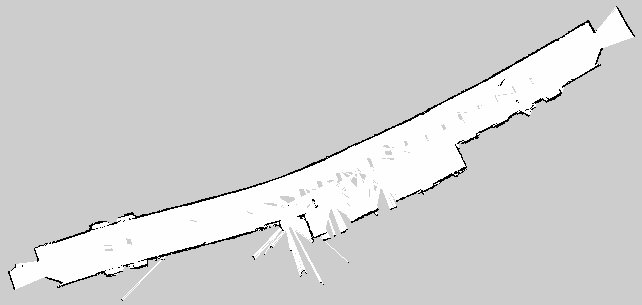
gmapping yields map with a bend at one point
Hi, I am using gmapping in a hallway 100 feet long and 8 feet wide. There is an alcove for elevators on one side in the middle of the hallway. I am using a URG-04LX laser scanner.
Each time I build a map, there is a bend that occurs at one end of the alcove. The hallway is mapped pretty straight except for the area where the bend occurs. Interestingly, the bend occurs at the same end of the alcove regardless of which end of the hallway the robot begins its mapping run.
I have plotted my odometry, x,y,and theta, and they are quite straight for the entire length of the hallway. I have played with srr,srt,str and stt; reducing them to zero makes the turn a little more abrupt, doubling the terms from the default values has little effect.
Of course the map should work pretty well for navigation, but the bend is annoying since my odometry is very good. Any suggestions will be appreciated.
Alex