
Frame Rotations and RViz

I am trying to calibrate my camera extrinsically, and the software I used gave me the camera translation and rotation, however, they are off by 1-2 axes. This means I need to apply "some" rotation(s) on them to get it into the correct position.
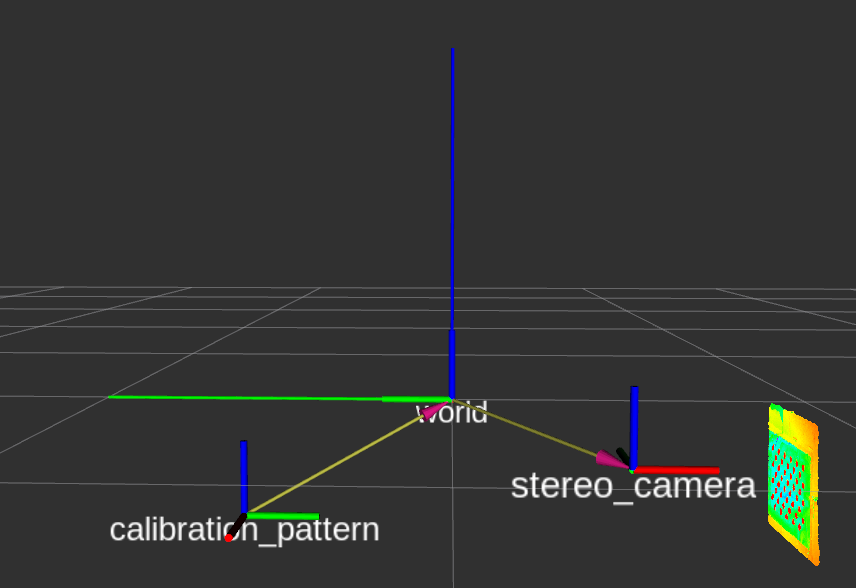
As you can see, the frame "stereo_camera" is not above the "calibration_pattern" as it should be, but pointing towards somewhere wrong.
I spot two rotations to be applied here:
1) Rotate the "stereo_camera" frame by +90 around its Y axis (so that the pattern cloud would look downwards)
2) Rotate the "stereo_camera" frame by +90 around world's X axis (so that the pattern would overlay with the "calibration_pattern" frame).
Now, having spotted these, I tried on Python to apply these rotations and then using static tf publisher to visualize on RViz whether or not it was correct. But no matter what I tried, I never got the correct rotations applied. Somehow what I see as "X" is not really "X" for Rviz apparently, so when I rotate around a particular axis, some strange stuff happens. One wastes his time keep on rotating.
Is there a tool on ROS, like a feature of RViz maybe I don't know, or a way to make this easy transformation hassle-free?

