
Collision checking failed
Hi
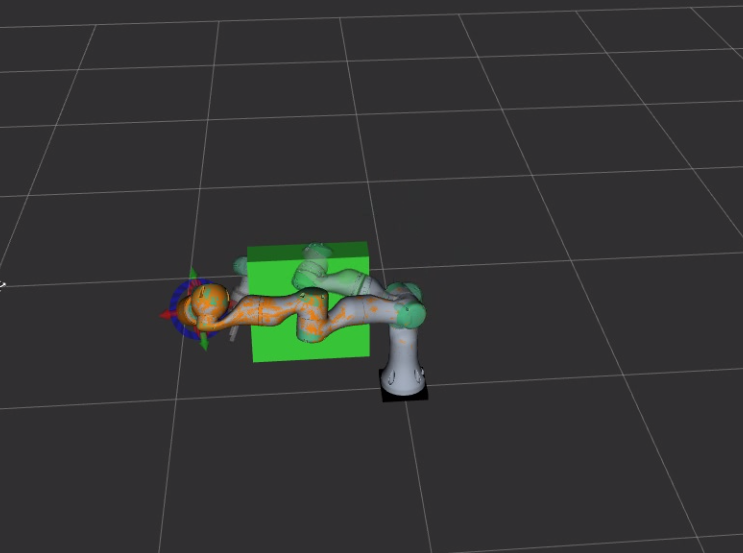
I am using ROS Kinetic with Ubuntu 16.04. I tried the moveit tutorials given here with my own 7 dof manipulator. After getting the collision object in the environment, I tried some random pose planning through Rviz gui and in one of the plans the robot is shown colliding with the collision object. I am posting the pic hereCan someone tell me why it is happening ??
add a comment

{kind=link}