
Problem with TF Tree in RPLidar Hector SLAM and Navigation
I'm a beginner in ROS and Robotics and have problem implementing an autonomous mobile robot.
I'm getting this error:
Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.101084 timeout was 0.1.
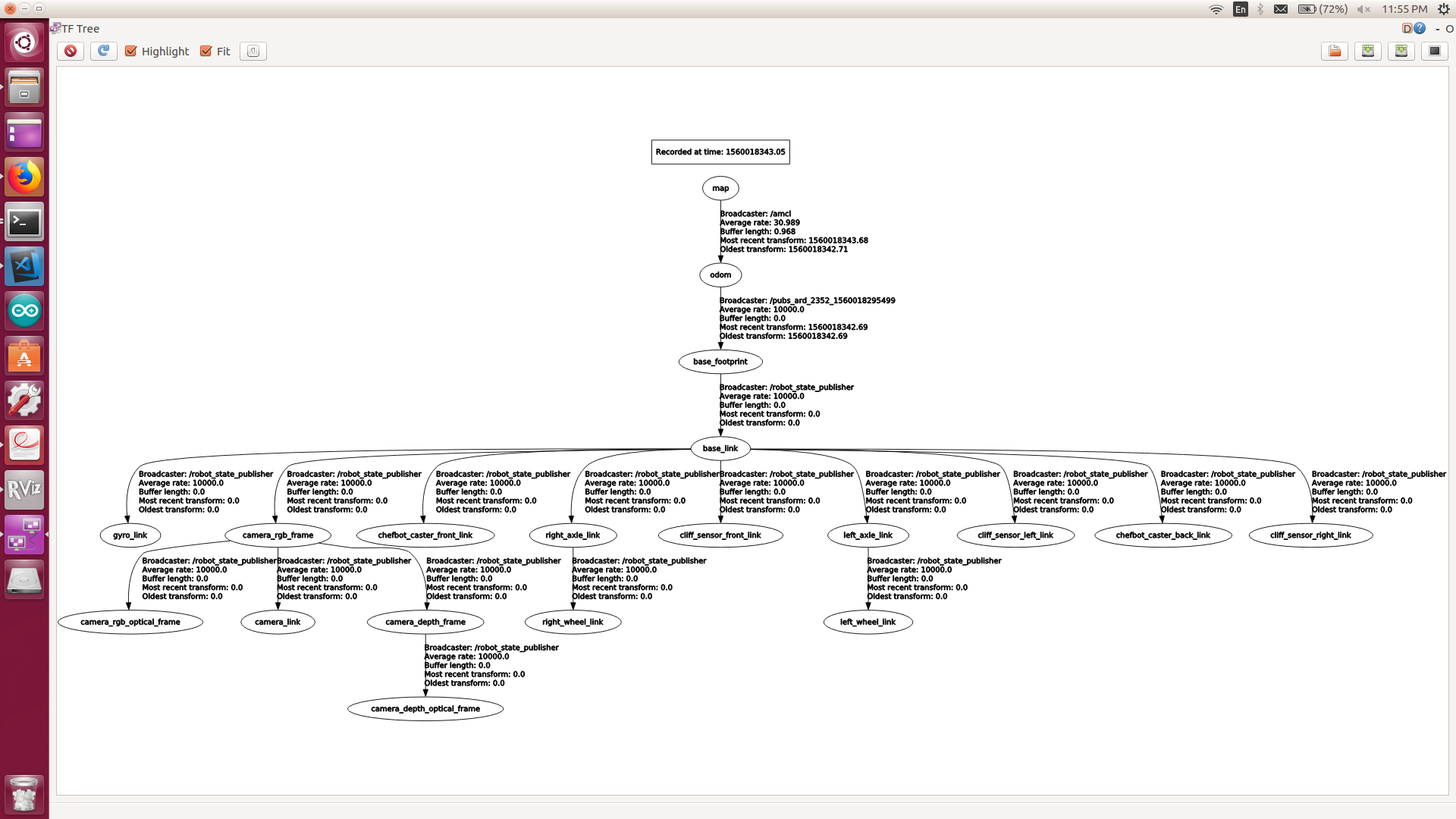
Firstly, I used chefbot package to make the autonomous navigation using Kinect and depthimage_to_laserscan, and it worked fine. Though there were some problem with reaching the exact position, which I am assuming can be solved by tweaking the parameters in navigation stack. The TF Tree when it ran correctly was the following:
Now, I replace the Kinect with RPLidar and things break. I assumed since, the laserscan will be available at /scan topic, I don't need to fire openni modules and depthimage_to_laserscan. I instead roslaunched rplidar_ros rplidar.launch and hector_slam_tutorial tutorial.launch
The TF tree obtained is:
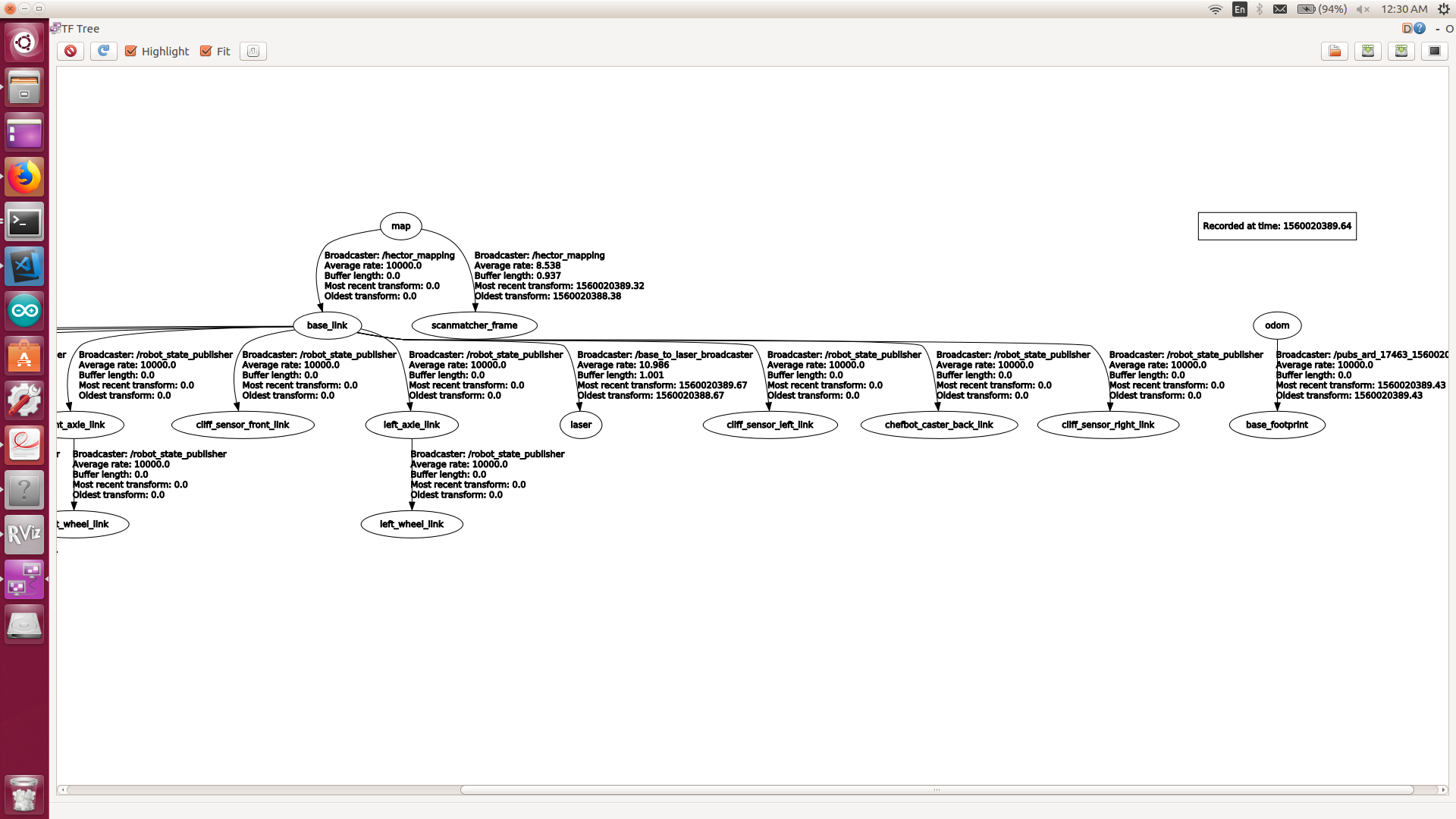
Which obviously seems to be broken, as there is no transform between map and odom and base_link and base_footprint. I think I can fix this by changing some param or args in hector_slam, because that's where the map to base_link. However, I donot know how to do it. I think running additional static transform might help? Something like:
<node pkg="tf" type="static_transform_publisher" name="door2" args="1.25 -4.5 0 0 0 0 /door2 /world 10"/>
Please let me know. Thanks!
PS: I'm using ROS Kinetic
