
Replace transform between odom and base
Using the ardrone_autonomy package, the ardrone_driver makes some transformations, as seen in the following picture:
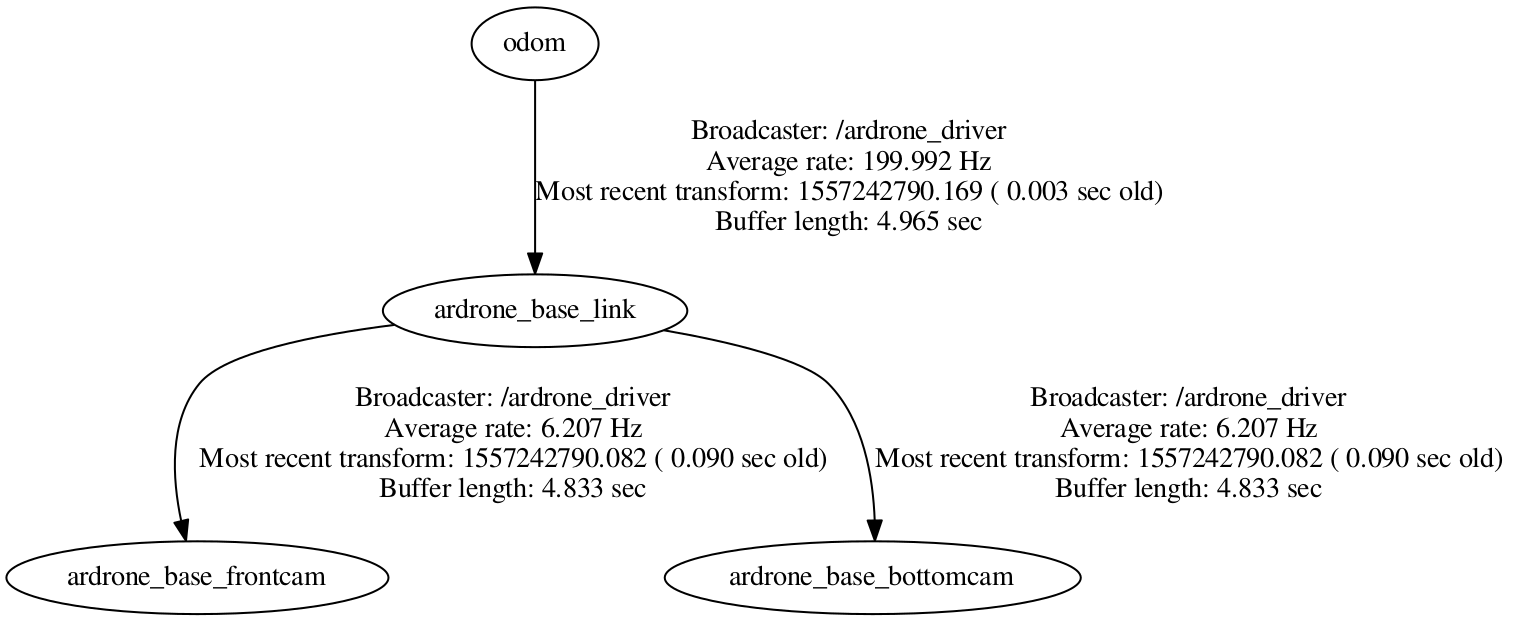
but I need to replace the transform between odom and ardrone_base_link frame by the transform provided by the robot_localization package (if possible, I would like to maintain the ardrone/odometry topic). How can I do that?
The ardrone_driver is an executable:


I'm not a
ardroneexpert at all, so I don't know whether this will work (or what the consequences could be for other components in your setup), but perhaps tf_remap can help here. You'd essentially remap theodom->ardrone_base_linktransform to something else and letrobot_localizationbroadcast it.Older Q&A about it: #q216582.
That is a good option. tf_remap can handle it temporally.