
UR5 manipulator look/point at a turtlebot3
Can anyone please point me in the direction of example code or a tutorial which uses a manipulator to track a mobile base robot or some other object?
I have a project to use a UR5 to track the movements of a turtlebot3. I have both robots simulated in Gazebo, I use teleop to drive the turtlebot around and I use moveit to put the ur5 end effector at randomly generated poses.
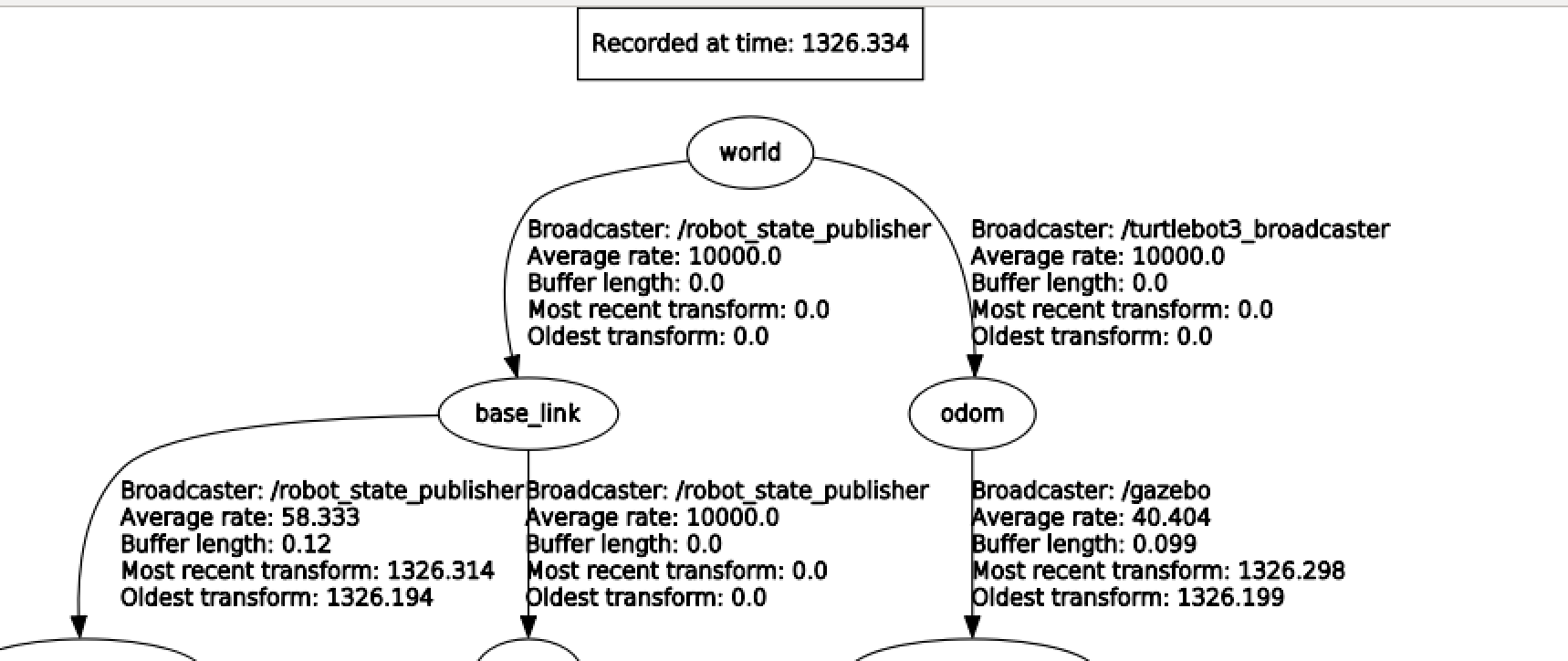
I am also using a static_transform_publisher to connect both robots \tf root nodes to the root world node. This has given me transforms with frame_id: odom for the turtlebot and child_frame_id: base_link for the ur5, as shown below.
What I don't know is how to use moveit to to execute the transform which would point the ur5 end effector in the direction of the turtlebot.
I would appreciate any assistance.
