
Robot reverses at high speed before following path given by ros nav stack
Hi,
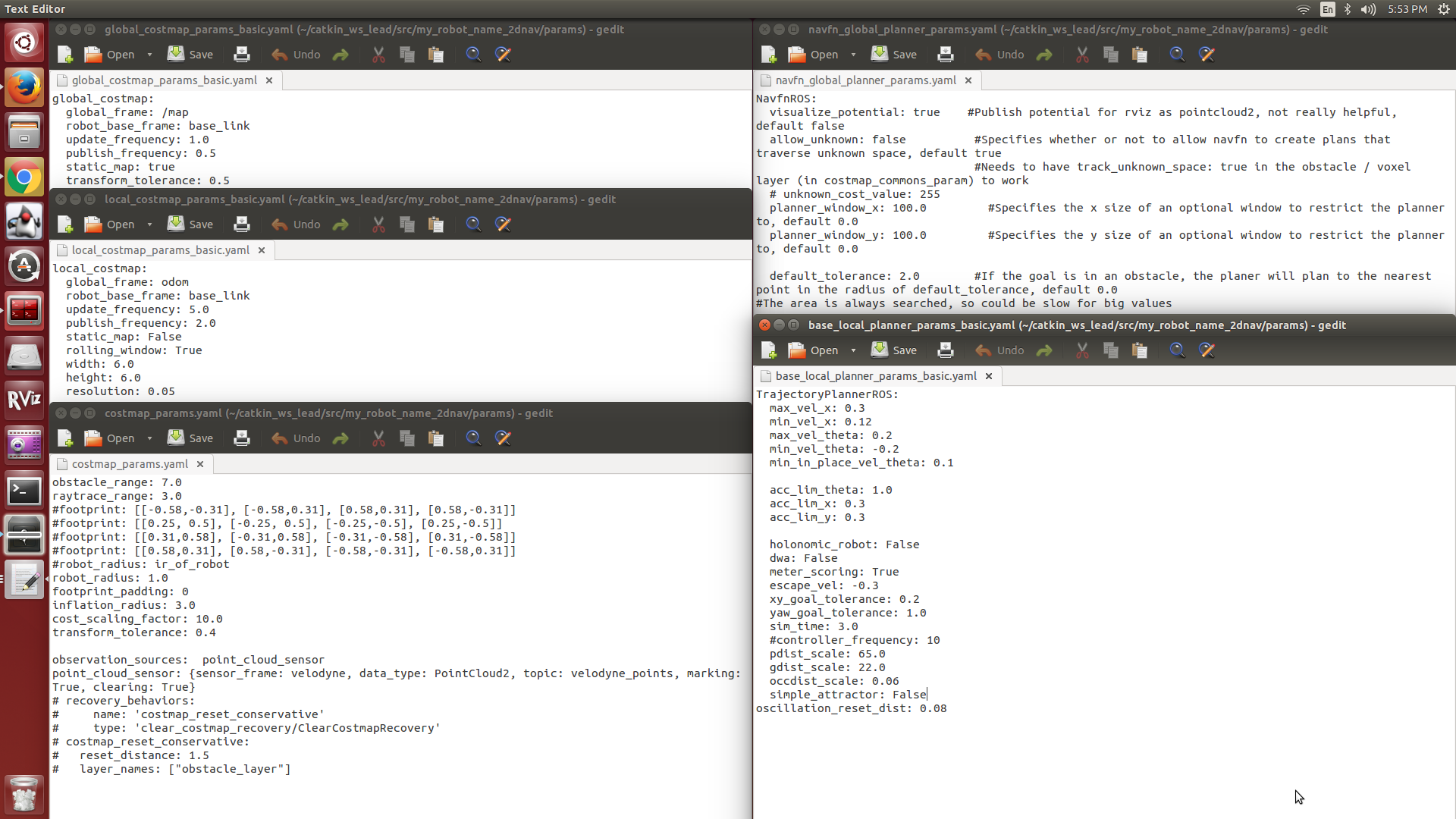
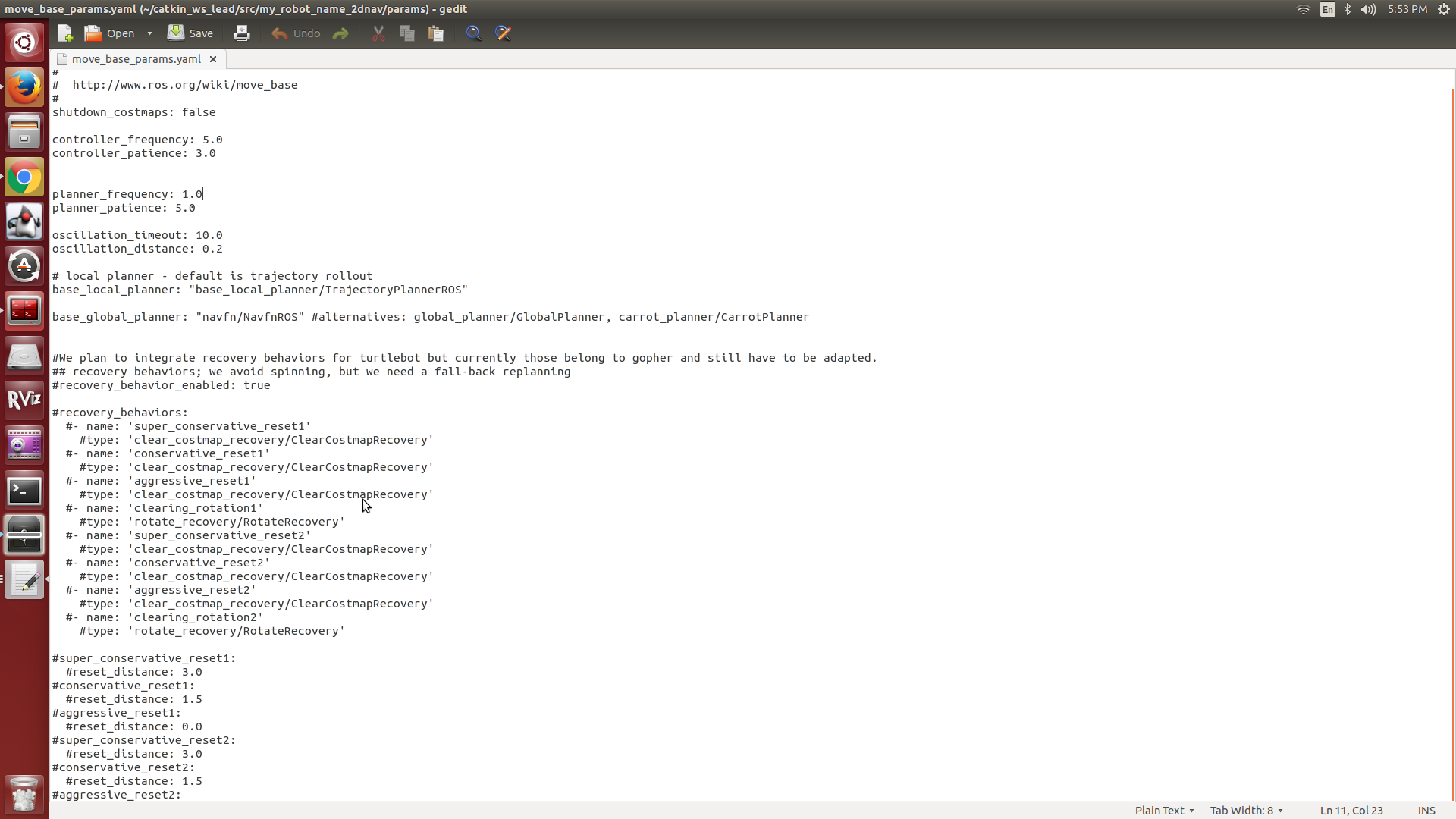
I am using ros nav stack in conjunction with google cartographer (Mapping and localization) to navigate the robot through a known map. Right now, the robot follows the path generated with acceptable accuracy. But,often, once the path has been generated, the robot reverses at the highest speed set in the params file (escape_velocity parameter), and then starts to move forward correctly on the genrated path.
I have attached images of all my param file: 1. C:\fakepath\params1.png 2. C:\fakepath\params2.png
This is a link to a video of how it looks on rviz. https://vimeo.com/320040685
The thinner line in green is the plan generated by ros nav stack. The thicker line seen later in the video is the actual robot movement. You can see that the robot first reverses and then starts moving forward.
I am new to this forum so please let me know if I need to give anymore data for anyone to answer this
Has anyone else has this probelm? Will apprecite any tips on fixing this! Thanks in advance!

{kind=link}
{kind=link}