
Orientation to grasp object from y axis
Hello,
I’m trying to achieve pick and place in gazebo by sending trajectory from moveit. I noticed in moveit pick and place tutorial that orientation is given as follows:
orientation.setRPY(-M_PI / 2, -M_PI / 4, -M_PI / 2)
This orientation tries to pick the object from x-axis direction ( considering x axis is forward, y axis is pointing to the left and z axis is upwards.) Below image demonstartes how my robot arm positions itself when given above orienatation
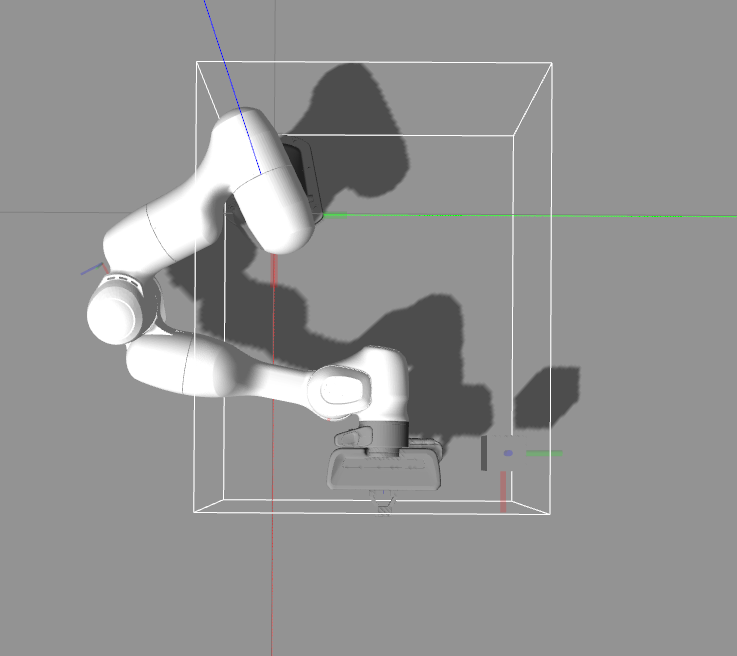
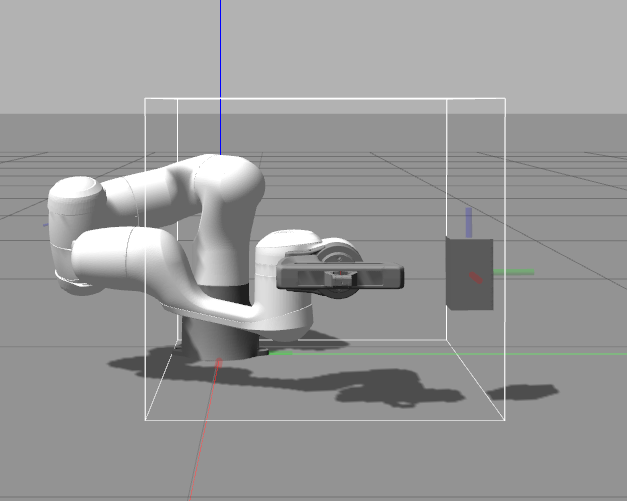
I want to grasp the object from y axis side i.e parallel to the yellow axis shown in the image. What can be the orientation of the robot??
I have came till this orientation:
orientation.setRPY(-M_PI / 4, -M_PI/2 , -M_PI /4)
below is the image representing robot arm with this orientation.
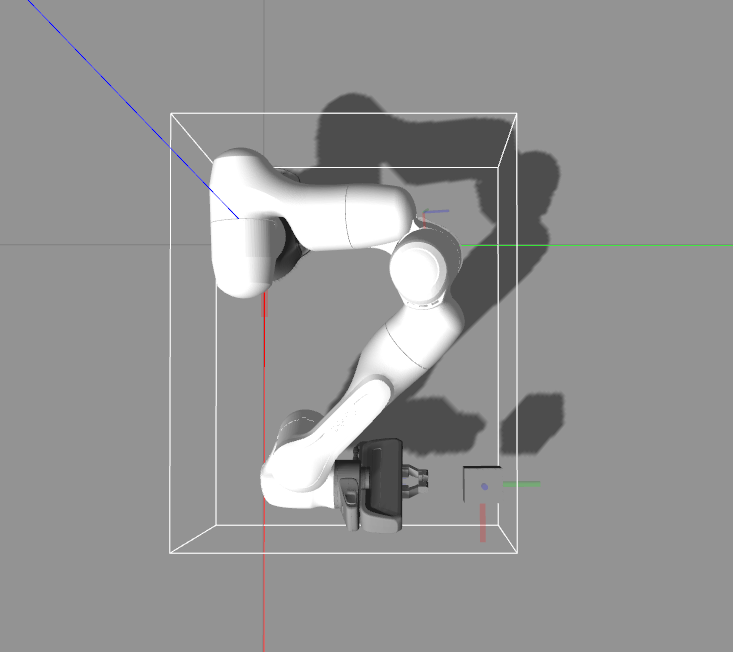
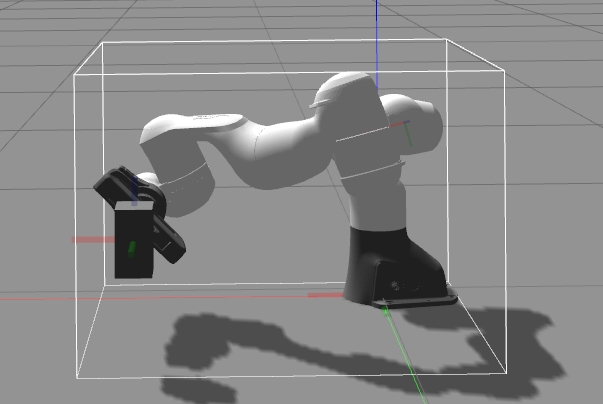
if you see then gripper is still inclined and not exactly horizontal. can anyone tell me what can be orientation to grasp the object from y axis direction??

Could you please not close questions if you've actually answered them?
Please click the checkmark to the left of the / your answer instead.
sure. My bad as i didn’t know this process. I’ll follow as you suggested.