
It doesn't display 3D model in RVIZ but it does in Gazebo [closed]
I'm just started to learn ROS and Gazebo using ROS Melodic and Gazebo 9.6.0.
I use this launch file to open RVIZ:
<launch>
<arg name="model" default="$(find nav_odom_description)/urdf/mybot.xacro" />
<arg name="gui" default="true" />
<arg name="rvizconfig" default="$(find nav_odom_description)/rviz/urdf.rviz" />
<param name="robot_description" command="$(find xacro)/xacro $(arg model)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" />
</launch>
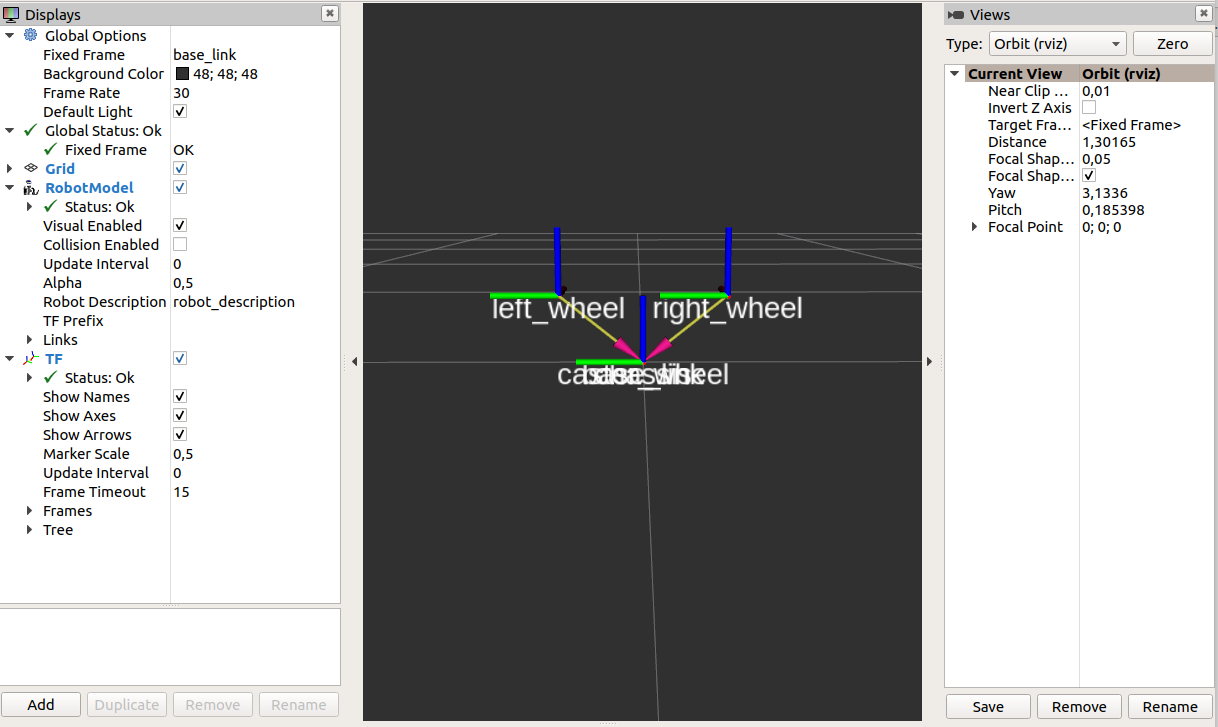
But I see that on it:
I use this launch file with Gazebo:
<launch>
<!-- urdf xml robot description loaded on the Parameter Server,
converting the xacro into a proper urdf file-->
<param name="robot_description"
command="$(find xacro)/xacro '$(find nav_odom_description)/urdf/mybot.xacro'" />
<!-- push robot_description to factory and spawn robot in gazebo -->
<node name="mybot_spawn" pkg="gazebo_ros" type="spawn_model" output="screen"
args="-urdf -param robot_description -model mybot" />
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find nav_odom_gazebo)/worlds/odom_bot.world"/>
<arg name="gui" value="true"/>
<arg name="verbose" value="true"/>
</include>
</launch>
And I see this:
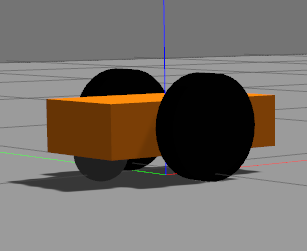
You can find the model here (I'm not using the camera yet).
Is it correct to see that in RVIZ? Why I can't see it like in Gazebo?

Can you check whether you're running into #q302787?
Thanks, that was the problem. Now I can see the 3D model on RVIZ.