
Extrapolation Error
I have tried to search this error on forum but almost all of them had simple mistakes like a wrong link name or something. However, I am facing this error and the names seem to be correct and I do not know whether this error comes from move_base or AMCL:
Extrapolation Error: Lookup would require extrapolation into the future. Requested time 1548151625.909495115 but the latest data is at time 1548151625.886743793, when looking up transform from frame [odom] to frame [map]
[ERROR] [1548151625.962153110]: Global Frame: odom Plan Frame size 102: map
This error happens when I publish a 2d goal using RViz.
I am running a Roscore using my Ubuntu PC and also running robot_description (xacro files), robot_localization, odometry and AMCL+map_server+move_base. Basically I run everything except for sensors.
Then I run Rosclient using my robot which has IMU and Lidar. It publishes to /scan and /imu topics and also accepts cmd_vel commands and runs the motors.
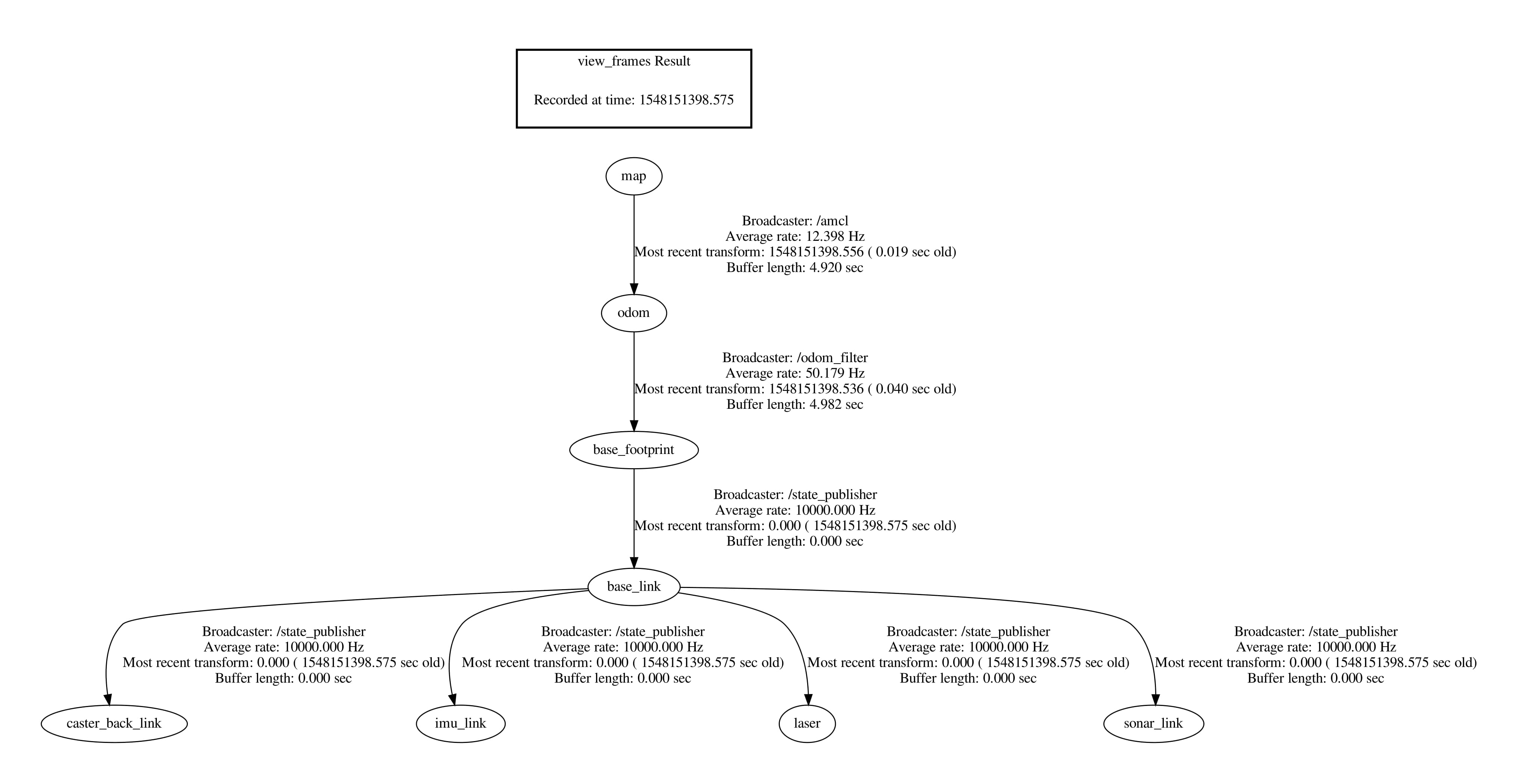
This is my tf tree when I run everything:
my local_costmap params:
local_costmap:
global_frame: odom
robot_base_frame: base_footprint
update_frequency: 5.0
publish_frequency: 2.0
transform_tolerance: 5 # 0.25 seconds of latency, if greater than this, planner will stop
static_map: true
rolling_window: true # Follow robot while navigating
width: 4.0
height: 4.0
origin_x: 0 #-1.5
origin_y: 0 #-1.5
resolution: 0.03
My global_costmap params:
global_costmap:
update_frequency: 5
publish_frequency: 2
transform_tolerance: 5 # 0.25 seconds of latency, if greater than this, planner will stop
static_map: true
global_frame: map
robot_base_frame: base_footprint
rolling_window: true # Follow robot while navigating
track_unknown_space: true
width: 32 #27.2
height: 32 #30.4
origin_x: -7
origin_y: -7
resolution: 0.03 #0.05
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}

This is probably caused by the
0.019sec (== 19ms) delay betweenmapandodom.Are your clocks synced between the two involved hosts?
@gvdhoorn Yes but the two frames exist on a single machine. Also, I have changed the local_costmap global frame param to map and the error disappeared but I am not satisfied with it as I think odom should be a global frame for it
I got the same error, and I follow your advice to change the local_costmap global_frame to map, and the error disappeared. Can you tell me how to understand this change? Thx