
Getting terrible mapping
Hi,
I have built a robot and fixed my odometry and it works quite good (1-2 cm off). Now, I have installed a Lidar and for some reason I get terrible positioning and sometimes the gmapping makes my robot to jump like here:
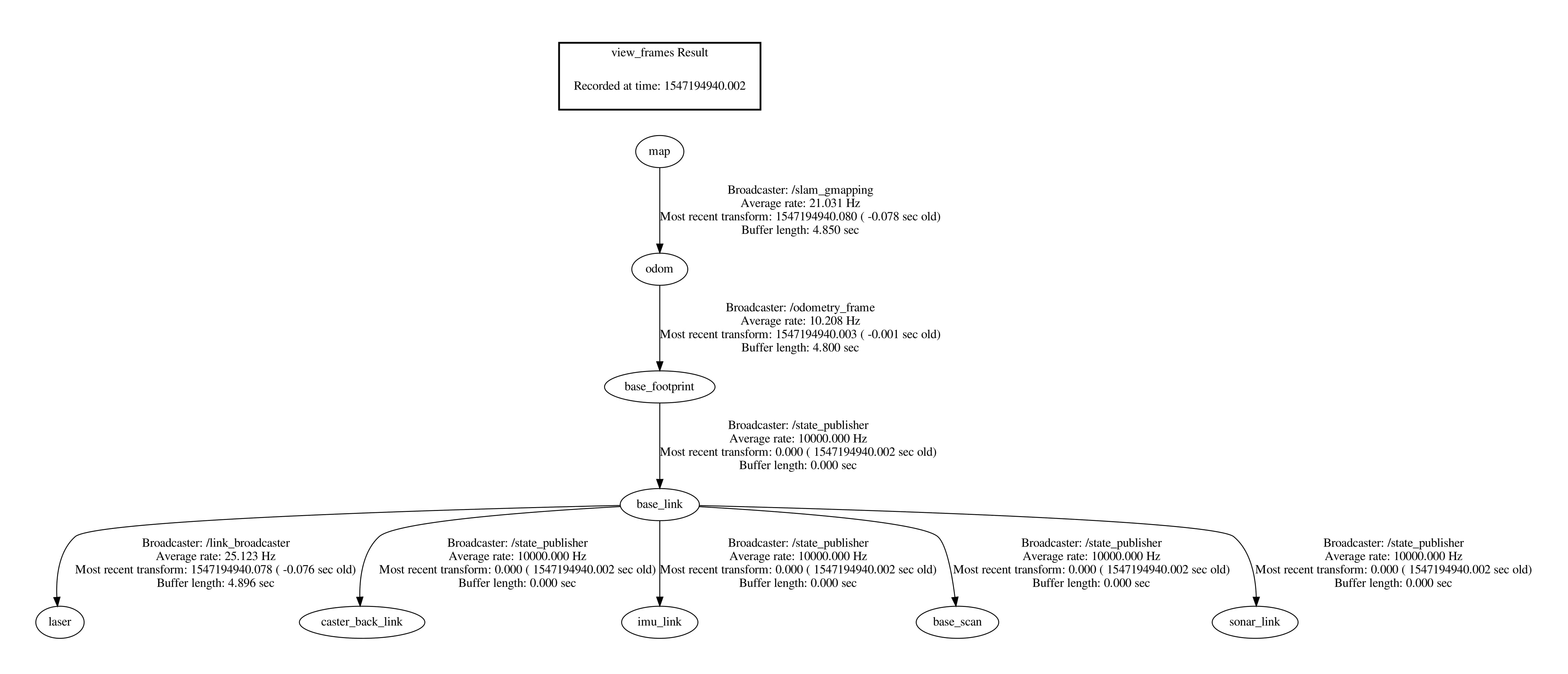
This is my Tf tree:
My gmapping launch:
<launch>
<param name="use_sim_time" value="false"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<!--remap from="scan" to="base_scan"/-->
<param name="maxUrange" value="5.5"/>
<param name="maxRange" value="5.5"/>
<param name="delta" value="0.25"/>
<param name="linearUpdate" value="-1"/>
<param name="angularUpdate" value="-1"/>
<param name="temporalUpdate" value="-1"/>
<param name="particles" value="30"/>
</launch>
Any idea why?

Is the robot moving with teleop or with move_base?
At first glance I'd say that your map is far too low resolution for your application. I'd recommend reducing the cell size/increasing the resolution by 5 to 10 times and see how it works.
@kosmastsk teleop
@PeteBlackerThe3rd Is there a way to turn off the gmapping localization? I think it tries to correct my odometry and messes everything up