
Lsd slam and octomap without flying ardrone
I am trying to create a map of a small room environment without any markers (the floor is tiled with single color) by moving the ardrone hand held without flying, since I see it drift and crash on takeoff and find it hard to control with a joystick.
So, I tried creating a map without flying but by manually moving ardrone.
When I map the world and create an octomap in RViz, the map is not proper and I get the following error,
[ERROR] [1546921746.080835983]: Transform error: Lookup would require extrapolation into the past. Requested time 1546921728.387689686 but the earliest data is at time 1546921736.091460943, when looking up transform from frame [arm1] to frame [map]
[ERROR] [1546921746.080940571]: Transform cache was not updated. Self-filtering may fail.
[ WARN] [1546921754.422194809]: Unable to transform object from frame 'ardrone_base_link' to planning frame 'map' (Could not find a connection between 'map' and 'ardrone_base_link' because they are not part of the same tree.Tf has two or more unconnected trees.)
[ WARN] [1546921754.423457023]: Unable to transform object from frame 'odom' to planning frame 'map' (Could not find a connection between 'map' and 'odom' because they are not part of the same tree.Tf has two or more unconnected trees.)
[ WARN] [1546921754.424048172]: Unable to transform object from frame 'ardrone_base_frontcam' to planning frame 'map' (Could not find a connection between 'map' and 'ardrone_base_frontcam' because they are not part of the same tree.Tf has two or more unconnected trees.)
[ WARN] [1546921754.433160874]: Unable to transform object from frame 'ardrone_base_bottomcam' to planning frame 'map' (Could not find a connection between 'map' and 'ardrone_base_bottomcam' because they are not part of the same tree.Tf has two or more unconnected trees.)
[ERROR] [1546921847.751302277]: Transform error: Lookup would require extrapolation into the past. Requested time 1546921831.294844885 but the earliest data is at time 1546921837.791631937, when looking up transform from frame [arm1] to frame [map]
[ERROR] [1546921847.751624075]: Transform cache was not updated. Self-filtering may fail.
Will the process require ardrone control commands and in flight for the transforms to be computed.
What are the parameters affected by the flight of the Ardrone? Is it possible to create a map without flying or flying is necessary?
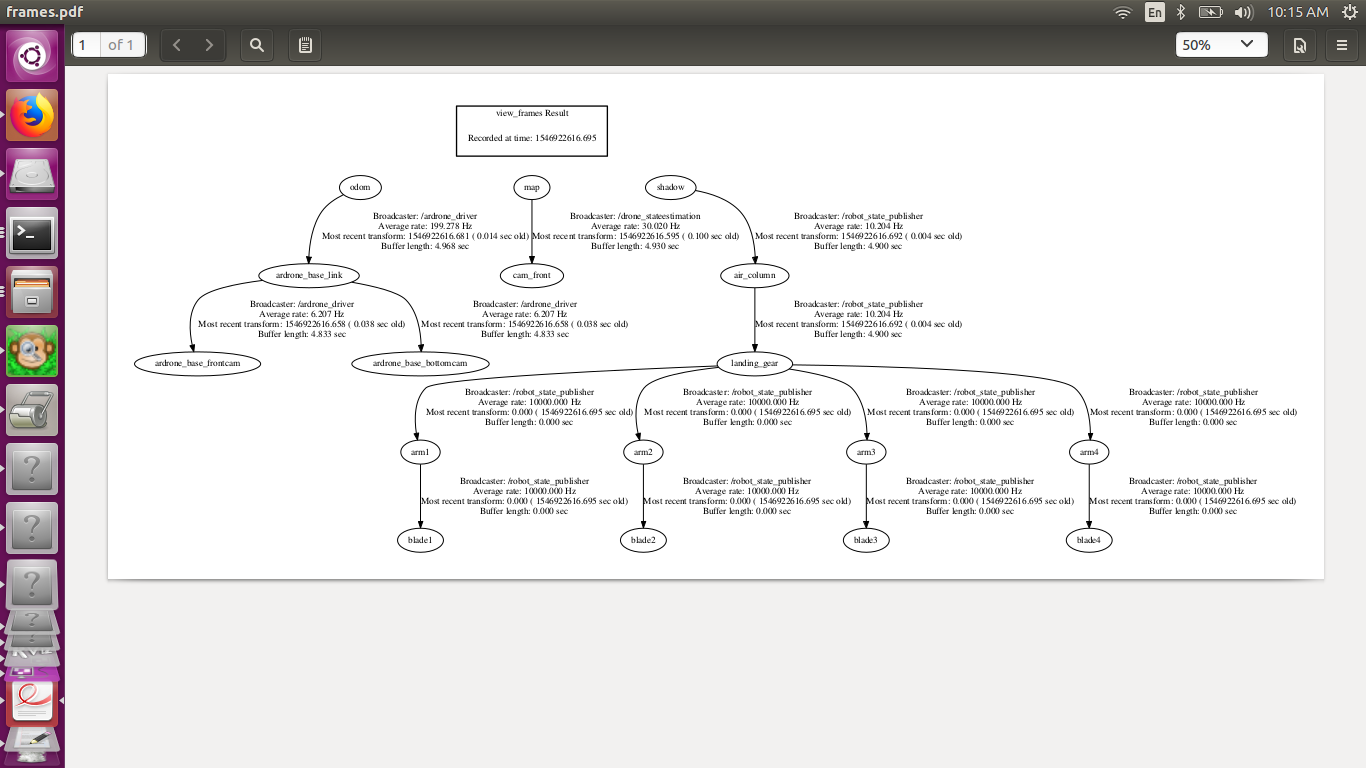 (/upfiles/154699149465248.png)
(/upfiles/154699149465248.png)

As seen from the graph, there is a missing tf link between
mapandodom. Try adding it and test again, then see if you get anything as the drone is probably outputting some velocity and odometry on its own while working and for the transformation to make sense you need this data.