
marker position and orientation

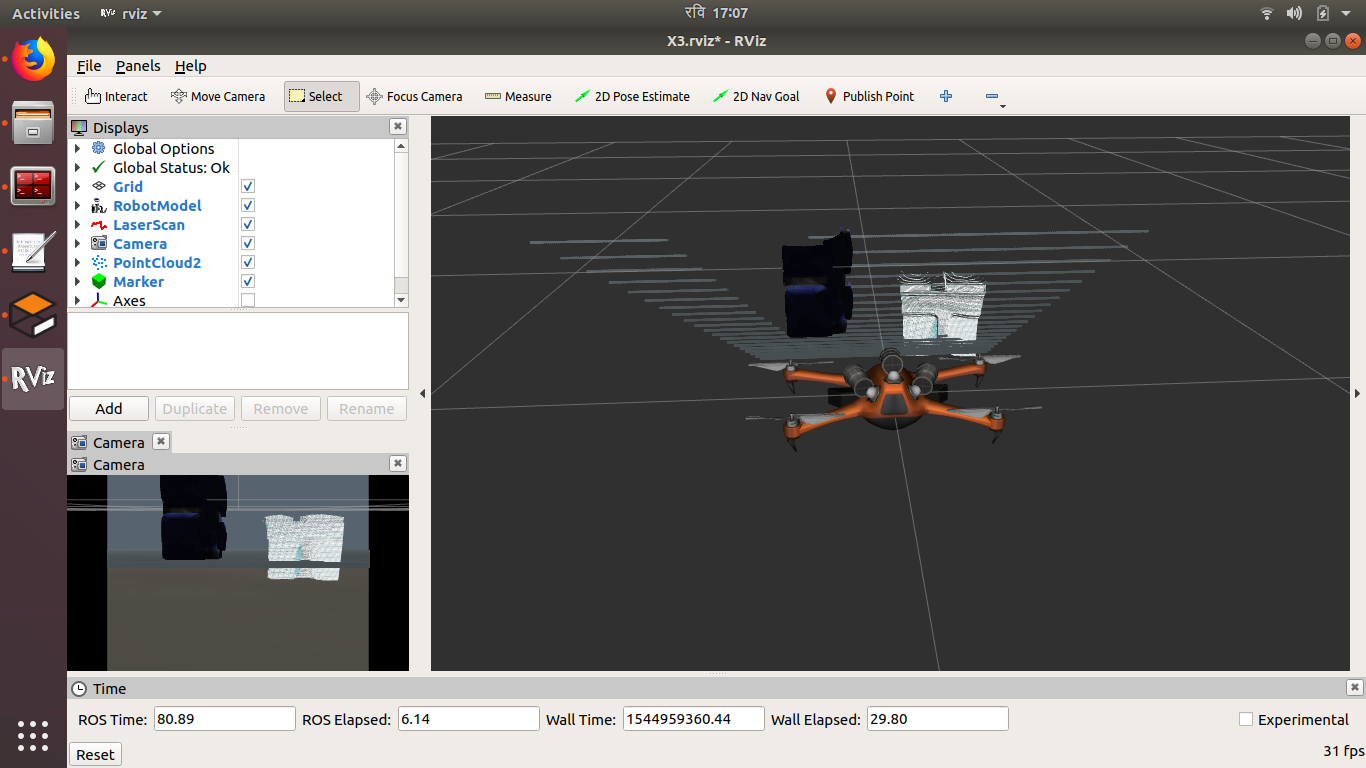
right now i am detecting a moving object in 3d point cloud and than sending the voxels of moved object in rviz. but when i view it in rviz, its color and oreantation is not coming correctly, what should i do to remove this problem?
Here is the screen shot, where i've put a bag infront of kinect sensor, but it is not displayed correctly in rviiz:
im using ubuntu 18.04, ros melodic. Here is the full code:
#include <ros/ros.h>
// PCL specific includes
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
#include <visualization_msgs/Marker.h>
#include <rosbag/bag.h>
#include <std_msgs/Int32.h>
#include <rosbag/view.h>
#include <boost/foreach.hpp>
#define foreach BOOST_FOREACH
#include <fstream>
#include <pcl/point_cloud.h>
#include <pcl/octree/octree_pointcloud_changedetector.h>
#include <pcl/io/pcd_io.h>
#include <iostream>
#include <vector>
#include <ctime>
#include <thread>
ros::Publisher marker_publisher;
int frame_index = 0;
using namespace std;
int x[200000];
void thread_function(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloudB,vector<int> v,int p0) {
for(size_t p1=0;p1<v.size() && ros::ok();++p1) {
int p0p1 = sqrt( pow(cloudB->points[v[p1]].x-cloudB->points[v[p0]].x,2)
+pow(cloudB->points[v[p1]].y-cloudB->points[v[p0]].y,2)
+pow(cloudB->points[v[p1]].z-cloudB->points[v[p0]].z,2) ) * 1000;
if(p0p1>10) {
for(size_t p2=0;p2<v.size() && ros::ok();++p2) {
int p0p2 = sqrt( pow(cloudB->points[v[p2]].x-cloudB->points[v[p0]].x,2)
+pow(cloudB->points[v[p2]].y-cloudB->points[v[p0]].y,2)
+pow(cloudB->points[v[p2]].z-cloudB->points[v[p0]].z,2) ) * 1000;
int p1p2 = sqrt( pow(cloudB->points[v[p2]].x-cloudB->points[v[p1]].x,2)
+pow(cloudB->points[v[p2]].y-cloudB->points[v[p1]].y,2)
+pow(cloudB->points[v[p2]].z-cloudB->points[v[p1]].z,2) ) * 1000;
if(p0p2>10 && p1p2>10) {
}
}
}
}
x[p0] = 3;
cout<<"ended thread="<<p0<<endl;
}
void cloud_cb (const sensor_msgs::PointCloud2ConstPtr& input)
{
frame_index++;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloudB (new pcl::PointCloud<pcl::PointXYZRGB> );
pcl::fromROSMsg(*input,*cloudB);
// Initializing Marker parameters which will be used in rviz
vector<visualization_msgs::Marker> line_list, marker, text_view_facing;
line_list.resize(4); marker.resize(4); text_view_facing.resize(4);
for(int i=0;i<line_list.size();i++) {
marker[i].header.frame_id = line_list[i].header.frame_id = text_view_facing[i].header.frame_id = "/X3/base_link";
marker[i].header.stamp = line_list[i].header.stamp = text_view_facing[i].header.stamp =ros::Time();
marker[i].ns = line_list[i].ns = text_view_facing[i].ns ="lines";
marker[i].action = line_list[i].action = text_view_facing[i].action = visualization_msgs::Marker::ADD;
marker[i].pose.orientation.w = line_list[i].pose.orientation.w = text_view_facing[i].pose.orientation.w = 1;
marker[i].id = i+4;
line_list[i].id = i;
marker[i].type = visualization_msgs::Marker::POINTS;
line_list[i].type = visualization_msgs::Marker::LINE_LIST;
line_list[i].color.r = 1; line_list[i].color.g = 1; line_list[i].color. b = 1; line_list[i].color.a = 1;
marker[i].scale.x = 0.003;
marker[i].scale.y = 0.003;
marker[i].scale.z ...add a comment

