
How to verify if motoROS was installed correctly

The motoman_driver tutorial left me hanging after these lines. How would I know if the pseudo-external signal is successful?
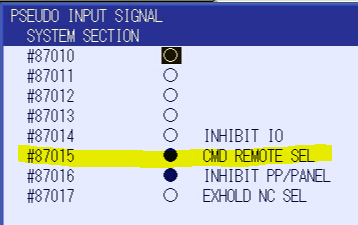
Rotate the pendant key-switch (upper left of pendant) fully counter-clockwise into TEACH mode. Upgrade your Security Level to MANAGEMENT Using the pendant, select [In/OUT]→[PSEUDO INPUT SIG] Set input #82015 CMD REMOTE SEL to ON Rotate the pendant key-switch (upper left of pendant) fully clockwise into REMOTE mode.
Thanks! I'm referring to this page: http://wiki.ros.org/motoman_driver/Tutorials/indigo/InstallServer

You tagged this with
HC10.Please see Compatibility with collaborative robots (HC series). Afaik, MotoROS is as yet not compatible with the collaborative robots of Yaskawa.
I was hoping the next line implied it would work if the Power/Force-Limiting features were disabled:
It's fine if it won't work, but we would rather use ROS ;)
Yes, that is stated in that section, but last time I spoke to @millete he said it was not supported at all at the moment.
Perhaps he can clarify.
Edit: and we should update the docs.
Reported: ros-industrial/motoman/issues/243.
I got a strong no on HC10 compatability from Motoman. Will edit the docs.
Your actual question has of course still not been addressed.
Perhaps @millete can answer that one as well :)
HC10 is not compatible today. But we have a team actively working on it now.