
Why I can subscribe /map
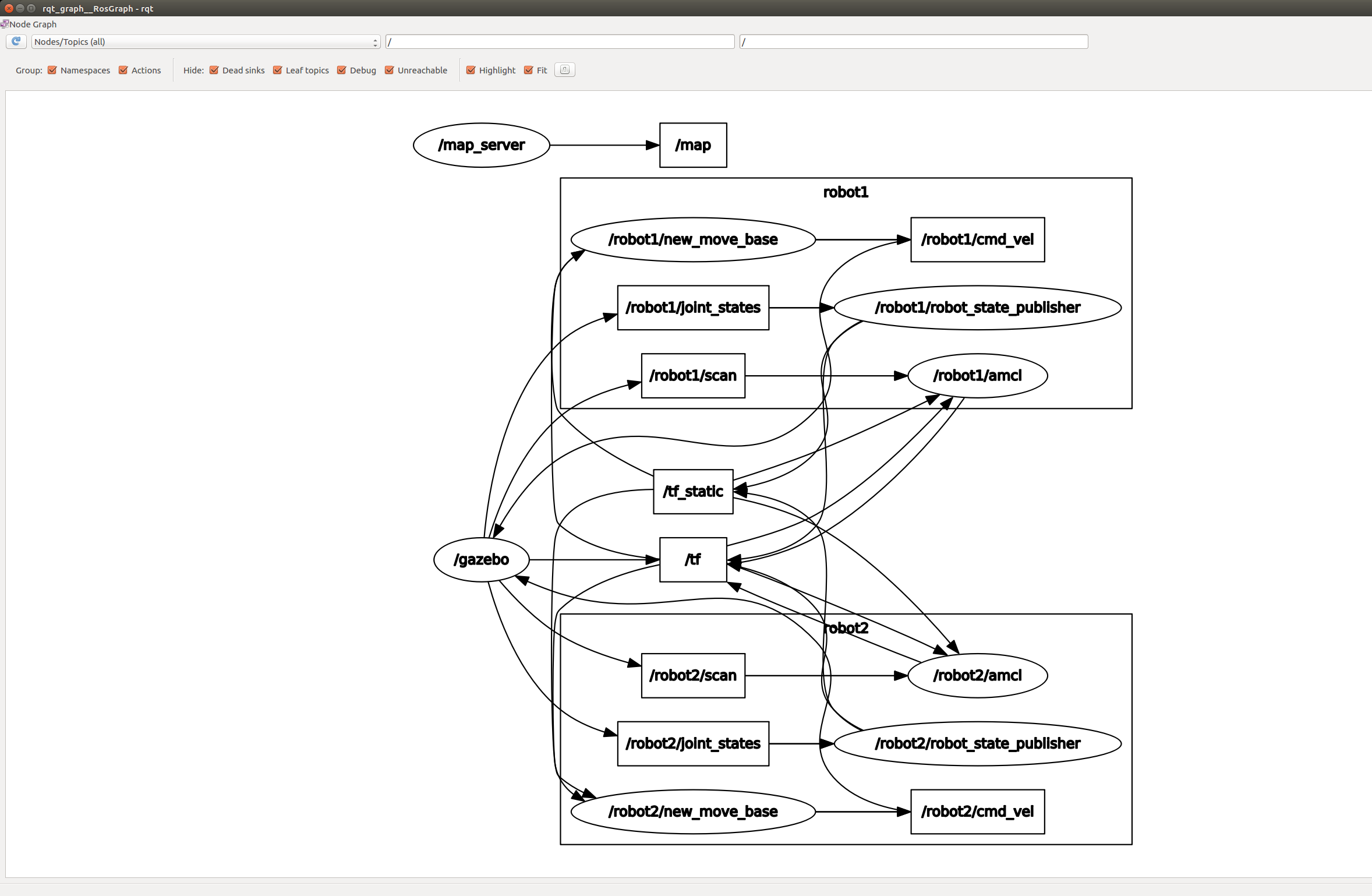
I tried to launch multiple turtlebot3 navigation. But when I launch the file, I find I didn't subscribe to the /map. I don't know why.
Here is my launch file.
<launch>
<param name="/use_sim_time" value="true"/>
<arg name="map_file" default="$(find turtlebot3_navigation)/maps/map.yaml"/>
<arg name="open_rviz" default="true"/>
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" >
<param name="frame_id" value="/map" />
</node>
<group ns="robot1">
<param name="tf_prefix" value="robot1_tf" />
<param name="amcl/initial_pose_x" value="1" />
<param name="amcl/initial_pose_y" value="1" />
<include file="$(find turtlebot3_navigation)/launch/new_move_base.launch" />
</group>
<group ns="robot2">
<param name="tf_prefix" value="robot2_tf" />
<param name="amcl/initial_pose_x" value="-1" />
<param name="amcl/initial_pose_y" value="1" />
<include file="$(find turtlebot3_navigation)/launch/new_move_base.launch" />
</group>
<!--node pkg="rviz" type="rviz" name="rviz" args="-d $(find your_pkg)/config/multi.vcg"
output="screen" -->
<node pkg="rviz" type="rviz" name="rviz" required="true"
args="-d $(find turtlebot3_navigation)/rviz/turtlebot3_navigation.rviz"/>
</launch>
new_move_base.launch
<launch>
<!--- Run AMCL -->
<include file="$(find turtlebot3_navigation)/launch/amcl.launch" />
<!-- Define your move_base node -->
<node pkg="move_base" type="move_base" respawn="false" name="new_move_base" output="screen">
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_burger.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_burger.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/move_base_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/dwa_local_planner_params_burger.yaml" command="load" />
<remap from="map" to="/map" />
</node>
</launch>
I think maybe I made mistakes in <remap from="map" to="/map"/>. I don't know why I can't subscribe to /map.
Btw, I add the 1 turtlebot3 launch file below.
<launch>
<!-- Arguments -->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="map_file" default="$(find turtlebot3_navigation)/maps/map.yaml"/>
<arg name="open_rviz" default="true"/>
<!-- Turtlebot3 -->
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_remote.launch">
<arg name="model" value="$(arg model)" />
</include>
<!-- Map server -->
<node pkg="map_server" name="map_server" type="map_server" args="$(arg map_file)"/>
<!-- AMCL -->
<include file="$(find turtlebot3_navigation)/launch/amcl.launch"/>
<!-- move_base -->
<include file="$(find turtlebot3_navigation)/launch/move_base.launch">
<arg name="model" value="$(arg model)" />
</include>
<!-- rviz -->
<group if="$(arg open_rviz)">
<node pkg="rviz" type="rviz" name="rviz" required="true"
args="-d $(find turtlebot3_navigation)/rviz/turtlebot3_navigation.rviz"/>
</group>
move_base.launch
<launch>
<!-- Arguments -->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="cmd_vel_topic" default="/cmd_vel" />
<arg name="odom_topic" default="odom" />
<!-- move_base -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_$(arg model).yaml" command="load" ns="global_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_$(arg model).yaml" command="load" ns="local_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/move_base_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/dwa_local_planner_params_$(arg model).yaml" command="load" />
<remap ...add a comment

