
multiple subscriptions ignoring messages [updated]
Hello,
My node is listening to 2 kinects on 8 topics for messages. Even though messages are published on all topics only 4 of the callbacks are invoked. I tried changing the LOOP_RATE, increased the QUEUE size but doesn't make a difference. Is there something I am doing wrong or missing?
Here's the code that I was running: listener.cpp
And here are my launch files for kinects:
Kinect1_openni_node.launch, Kinect2_openni_node.launch, kinect_frames1.launch , kinect_frames2.launch
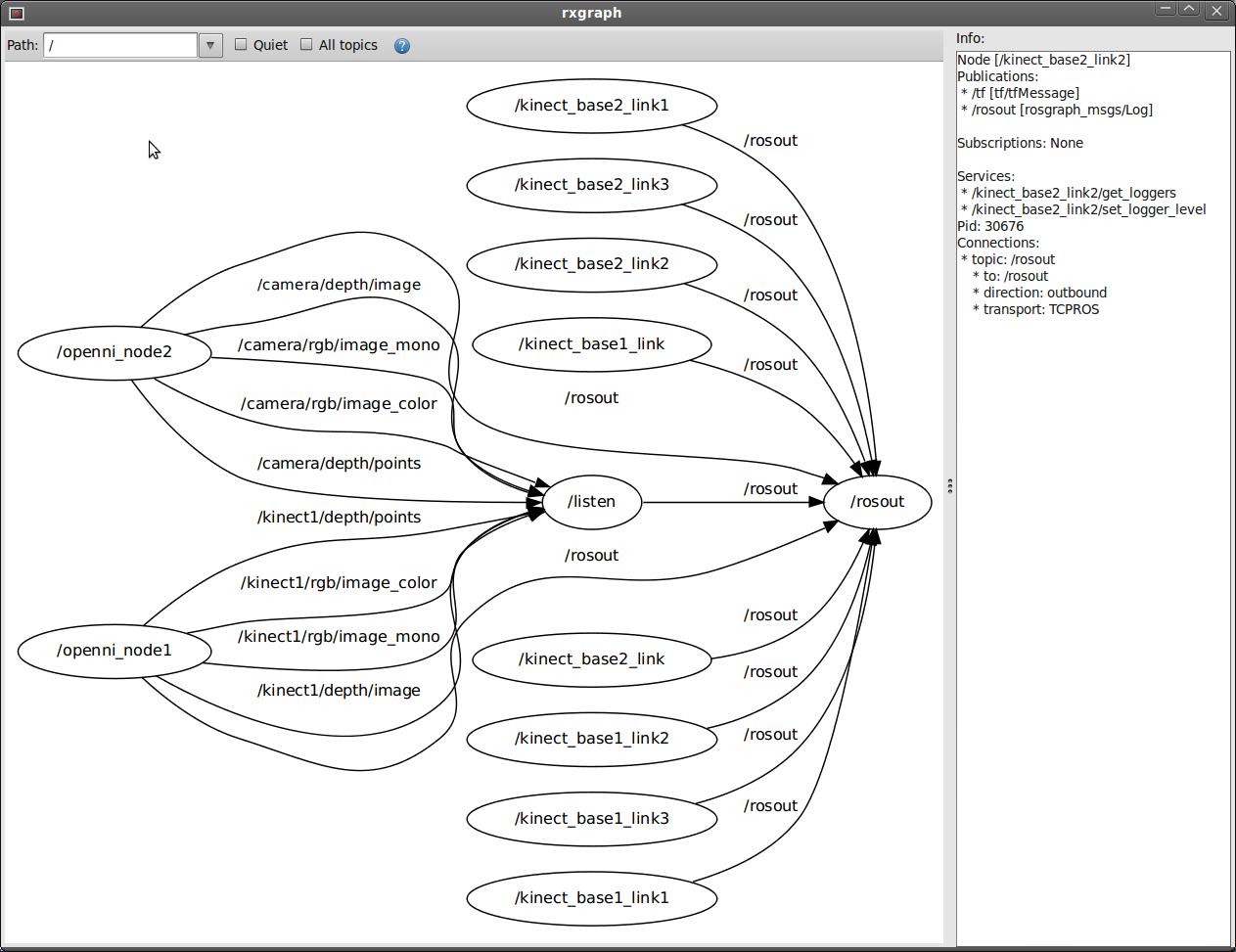
Here's my rxgraph
 When I run listener.cpp , all I get is the following i.e. it skips messages from 4 topics
When I run listener.cpp , all I get is the following i.e. it skips messages from 4 topics
[ INFO] [1299768991.573907570]: Depth Image: [2]
[ INFO] [1299768991.580039704]: Kinect1 Depth Image: [6]
[ INFO] [1299768991.594992942]: Depth Points: [216]
[ INFO] [1299768991.598203115]: Depth Image: [2]
[ INFO] [1299768991.618901837]: Kinect1 Depth Points: [5]
[ INFO] [1299768991.622189841]: Kinect1 Depth Image: [6]
[ INFO] [1299768991.641956580]: Depth Points: [217]
[ INFO] [1299768991.646081980]: Depth Image: [2]
^C[ INFO] [1299768991.660327453]: Kinect1 Depth Points: [5]
Thanks for any help. Best, CV
Comments
Please add more information to help us debug. Such as sample code, launch files, outputs of rxgraph, and appropriate rostopic hz. This sounds like a configuration issue not a code issue.
It's impossible to say, unless you at least tell us which topics you subscribed to.
@Tully & @ Felix Endres: I've updated my question as requested. Please let me know your opinion. Thank you.
add a comment

