
How to use dynamic_reconfigure for /gazebo vs. /gazebo_gui?

I'm starting Gazebo 7 via ROS Kinetic, which is working fine so far.
Now I need to adjust the time_step and max_update_rate parameters to get a real-time simulation.
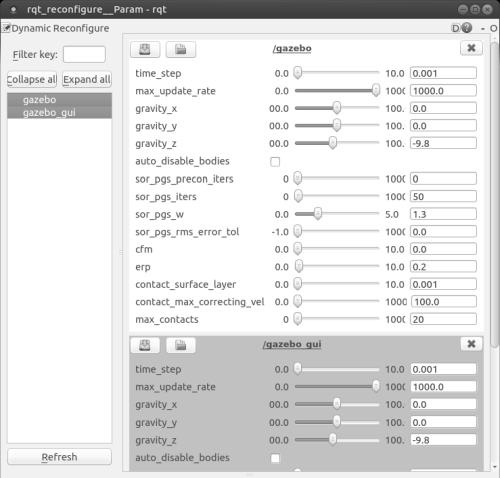
But when I open the reconfigure GUI, I get two sections: /gazebo and /gazebo_gui. Both contain the same parameters with the same values. Unexpectedly, they are not mirrored. If I change something for /gazebo, it doesn't get synced to /gazebo_gui even after refreshing. To be even more confusing: Gazebo behaves totally different if I change a setting in /gazebo or in /gazebo_gui. At least regarding the two time parameters I mentioned above which are of interest to me.
How is the reconfiguration supposed to be used? Is there a deeper sense I missed? I'm totally unsure whether this is more related to ROS or Gazebo.
Screenshot of the two sections:

I am also curious about this. As far as the two categories syncing - it's not necessarily simple to push a change to the dynamic reconfigure server (in C++ it involves initializing the server with a mutex and then locking to call and updateConfig() function).
(cont.) For this reason, if both categories do control the same params, I can understand why the changes might not be reflected by the other. You mention that changing the same param results in different behavior for each category though, which is puzzling.