
Some problem in gridslamprocess.hxx of slam_gmapping
Sorry to disturb you all!!
I found some problems about gmapping when I using Turtlebot Package, there is a document which named "gridslamprocess.hxx".
roslaunch turtlebot_navigation gmapping_demo.launch
I already modify it, but when I do catkin_make and create a new slam_gmapping,
I run the new one,but I didn't see have any change after I modify it.
I noticed that every time when I run gmapping, there are some information on the screen.
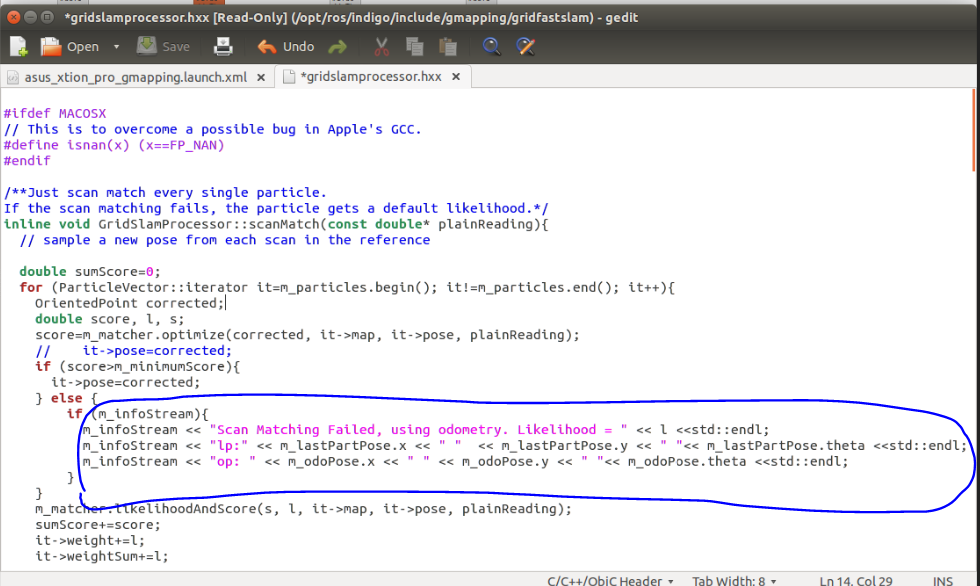
Ex: When scanmatch Done! it will show laser poser: x,y,z on screen. When scanmatch failed,it will use odometry. Then show lp: x,y,z op:x,y,z on screen.
So I want to get lp: op: laser pose These (x,y) information, so I'm trying to modify the source code.
When I looked in the source code, I found gridslamprocess.hxx, but i did't see any happened after me modify it
Of course, I already compile after modifying.
I want to get m_lastpartpose.x m_lastpartpose.y m_odopose.x m_odopose.y
But I need some help..
Has anyone ever modified this file? Thank you very much!!😓

Why did you modify the source?
Because I can only subscribe to /odom now, then get a pair (x,y). I also need another pair of (x,y) to compare.
So I noticed that every time when I run gmapping, there are some information on the screen.
Ex: When scanmatch Done! it will show laser poser: x,y,z on screen. When scanmatch failed,it will use odometry. Then show lp: x,y,z op:x,y,z on screen.
So I want to get lp: op: laser pose These (x,y) information, so I'm trying to modify the source code.
Are you saying that you are using gmapping for localization?
yes,I am using turtlebot and use gmapping to do SLAM
Please don't use images to post text. Images can't be searched/copy-pasted. Please update your question with a copy and pasted of your code instead.
Thank you~~ I'll get what I want now!!