
rviz keeps displaying initial pose
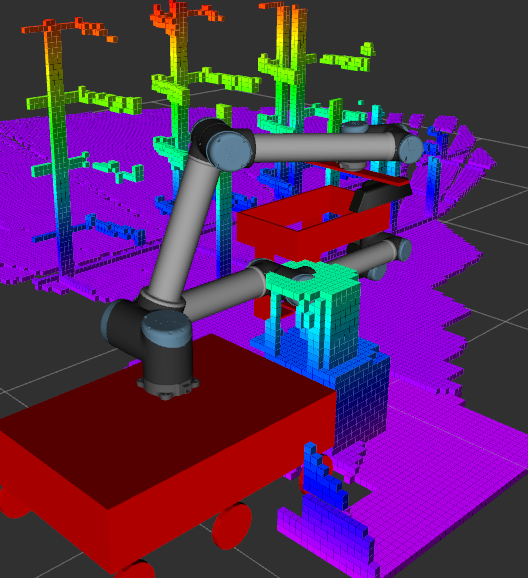
When I use rviz, the initial state of the robot persists throughout the entire session. In the picture below, the robot started stretched out parallel to the ground then moved up into the higher pose. Everything in rviz seems to work fine but it would be nice to (a) know what's causing this artifact, and (b) not have that pose cluttering the view. Can you help me?

I haven't seen this happen. Have you tried deactivating elements of the Rviz display and/or adjusting alpha values to see which object the dead pose belongs to? Does it have TF frames? Check out the tree. If nothing else works, can you post your Rviz tab, URDF and SRDF?
Thanks. That helped. I'll put it in an answer.