
I merge two lidar sensors but odometry doesn't work

I merge two lidar information with ira_laser_tools package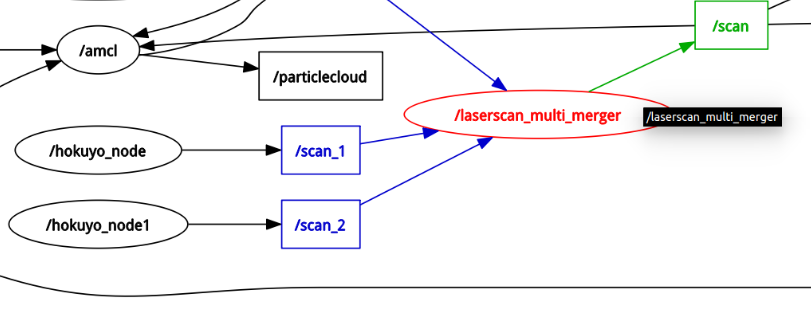
When I perform navigation,the car runs. But the TF on rviz and the red arrows on odom stop at the same place.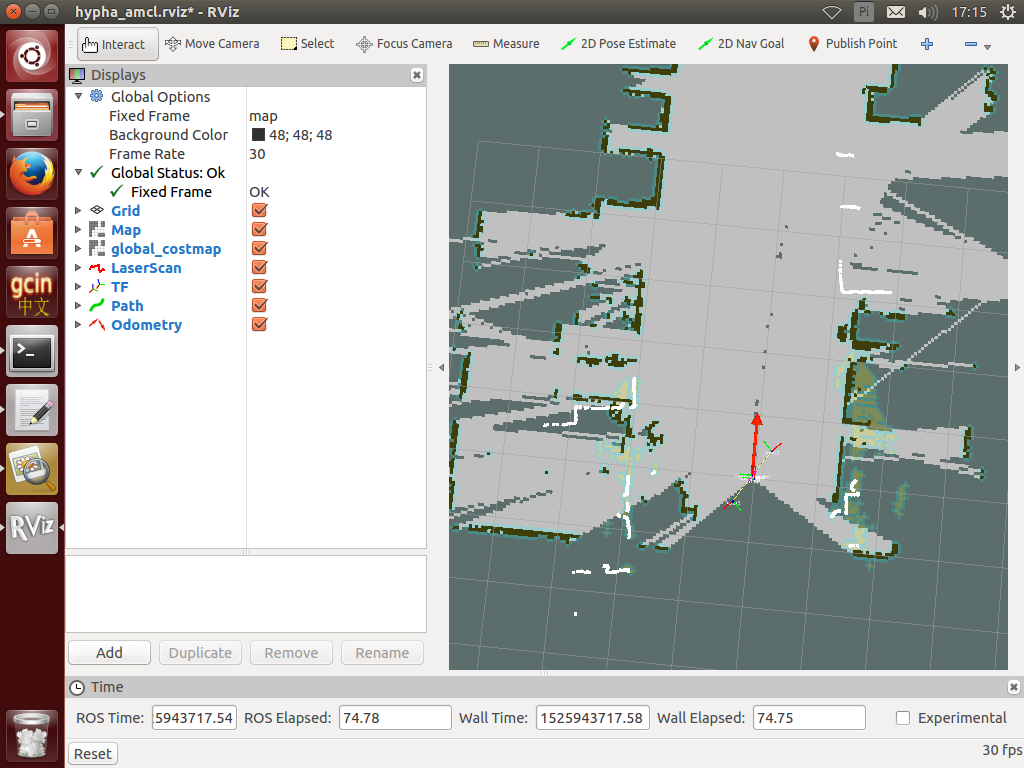
And scan information cannot match map always miss match. Does anyone know what caused this? Thanks

Have you had the odometry working with a single lidar, but it stopped working when you merged the second lidar? Or is this your first setup?
@PeteBlackerThe3rd I use a single lidar can work,but it stopped working when I merged the second lidar. How can I solve this problem? Thanks.