
Rviz shows wrong world frame
I'm trying to add the camera to a scene (separated with the robot). I can receive the image and point cloud from simulation, but the world frame looks very wrong in Rviz, while it looks ok in Gazebo.
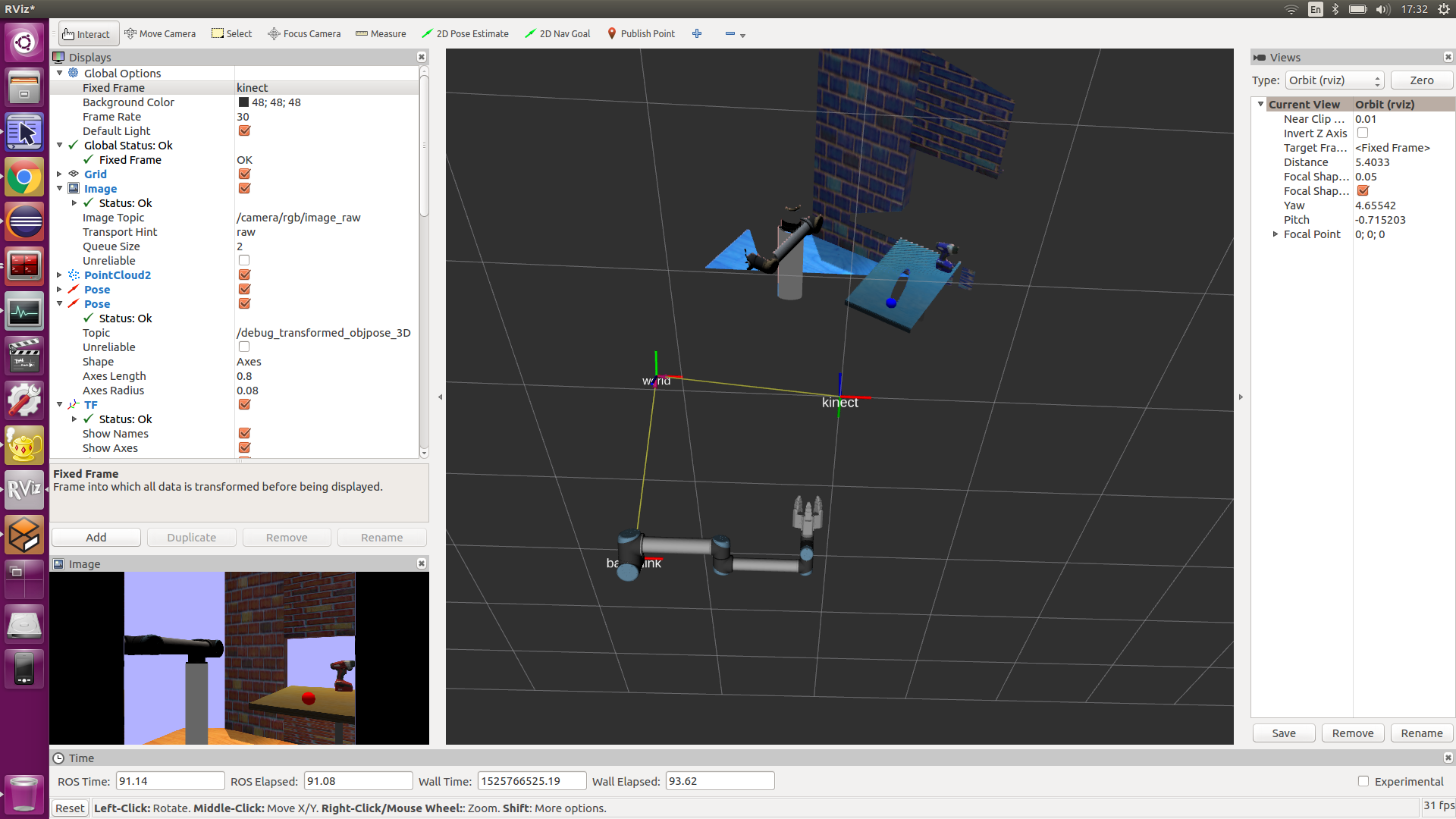
The image below is from Rviz, which shows not correct frame (the robot model did not overlap with the point cloud of the robot recorded by the camera), while the world frame should be around the table.
I did add a static tf transform from world to camera link in the launch file. Do we have a way to fix this?
Edit: Thanks for your help!
I did add the tf transform in the launch file like this:
<node name="world_to_kinect" pkg="tf" type="static_transform_publisher" args="1 0 1 0 0 0 world kinect 100" />
Where should I add this information to tell there is a transformation between kinect frame and world frame in RVIZ?



Please attach your images directly to your question. I've given you enough karma for that.
thanks! I edited the question.