
Comprehensive tutorials for understanding rtabmap and its parameters.
Hi,
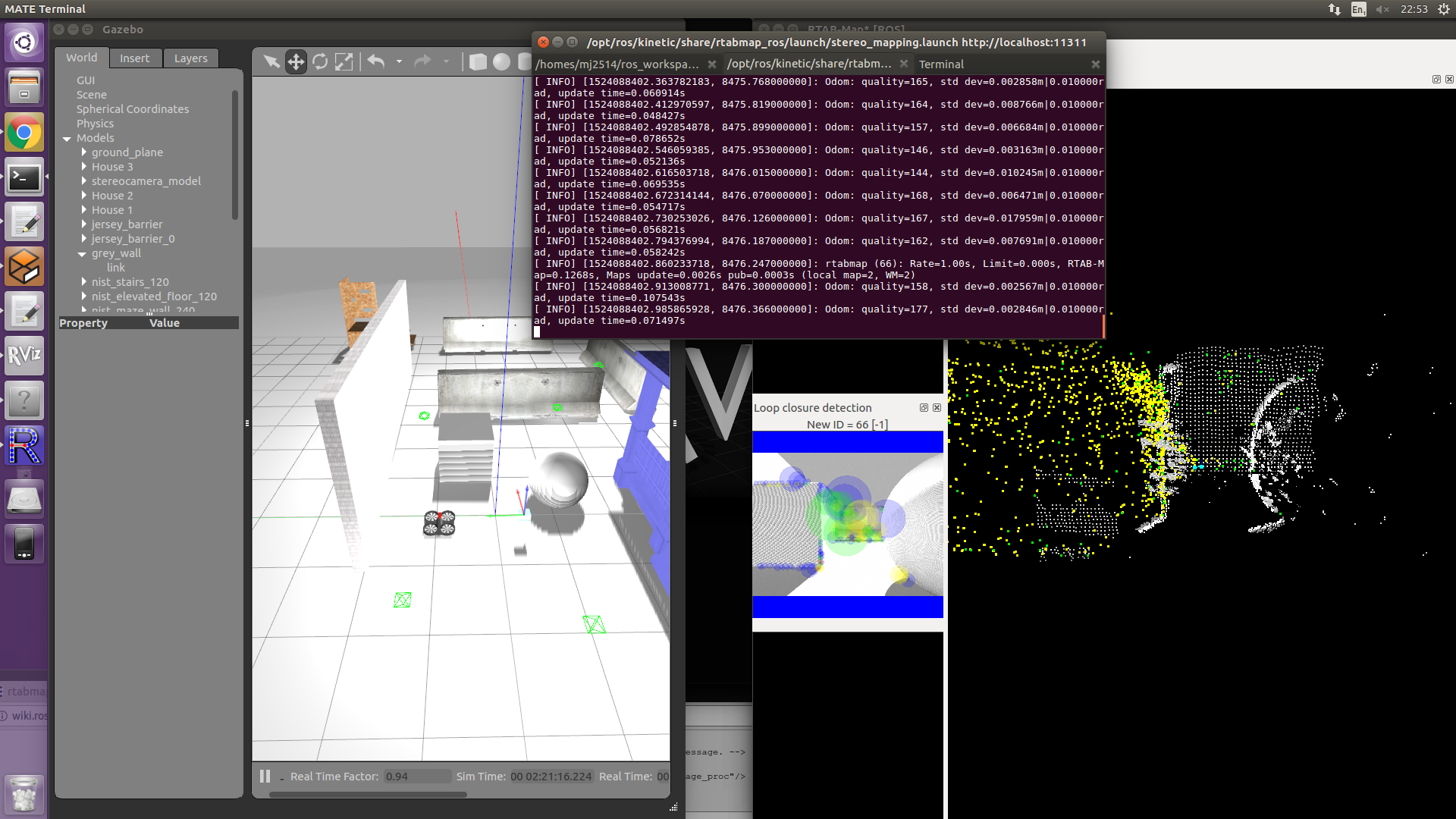
I am currently trying to use rtabmap_ros (using handheld stereo cameras) to try and create an Octomap.
However, having no prior experience in mapping, I am currently unable to follow how rtabmap works (even after reading the tutorial from ROS wiki ).
I got a few results using stereo camera in Gazebo simulation + rtabmap C:\fakepath\rtabmap.png and C:\fakepath\rtabmap_died.png ), but am not completely sure as to how it can be improved and what the output parameters of rtabmap mean ...
My question: Are there more comprehensive sources/tutorials for rtabmap and the (longgg) list of parameters it provides, for beginners ?
Thanks!

{kind=link}
{kind=link}
For the crash, which version are you using? Also for visual odometry, simulated environment like is difficult as there are not so much discriminative visual features.
You mean which version of ROS ? I am using ROS kinetic ... and for the simulated environment I was only trying it out ... what would you suggest ?
I assume you are using kinetic rtabmap binaries too, you may try the latest from source if this error happens too often. In the current environment you have, you may try to fly around the cement blocks with some visual texture than the full white cube and sphere.