Flickering of map in rviz (gmapping)
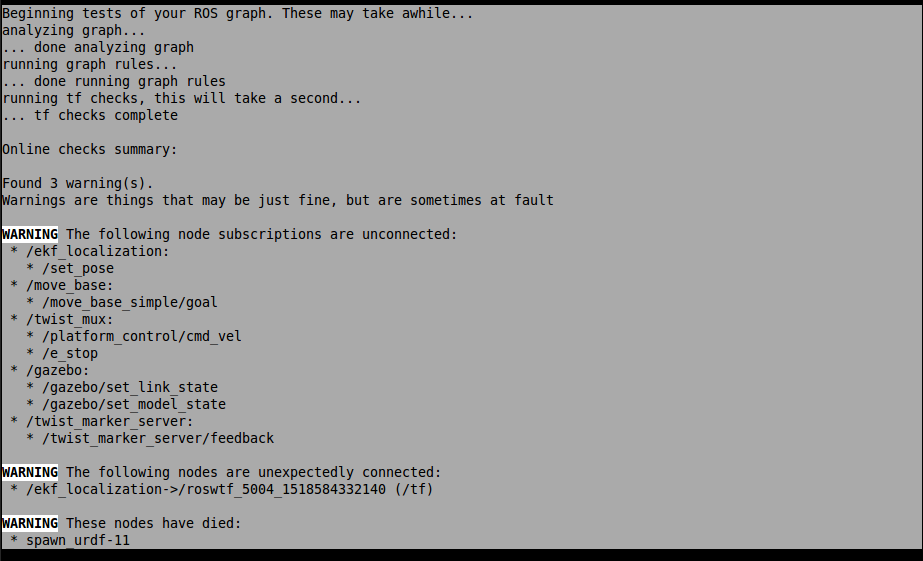
link text I am doing navigation on ROS, while in gmapping the map which is published is also flickering. Please check the given link so you will get rough idea. Is there any TF issue?
add a comment


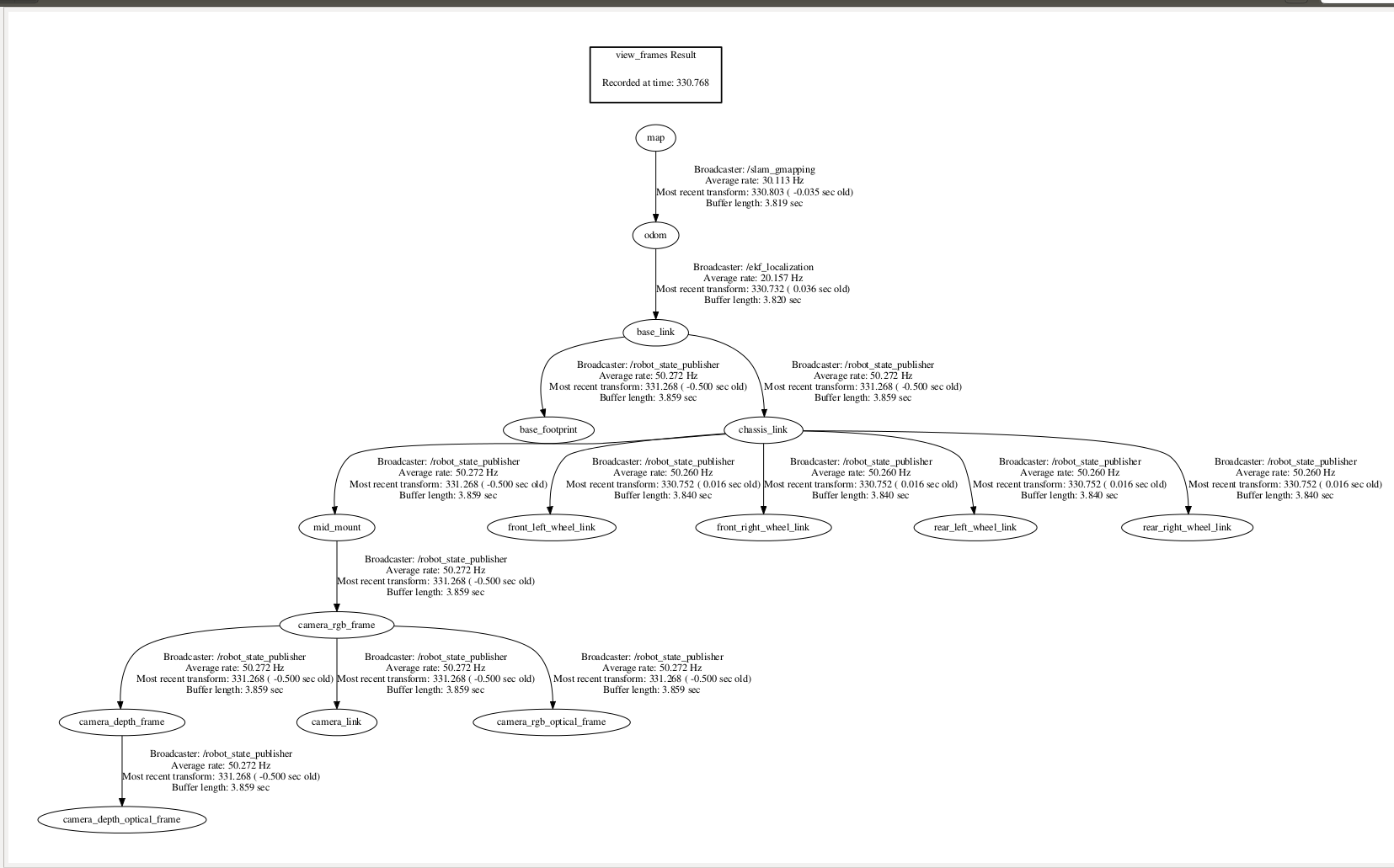
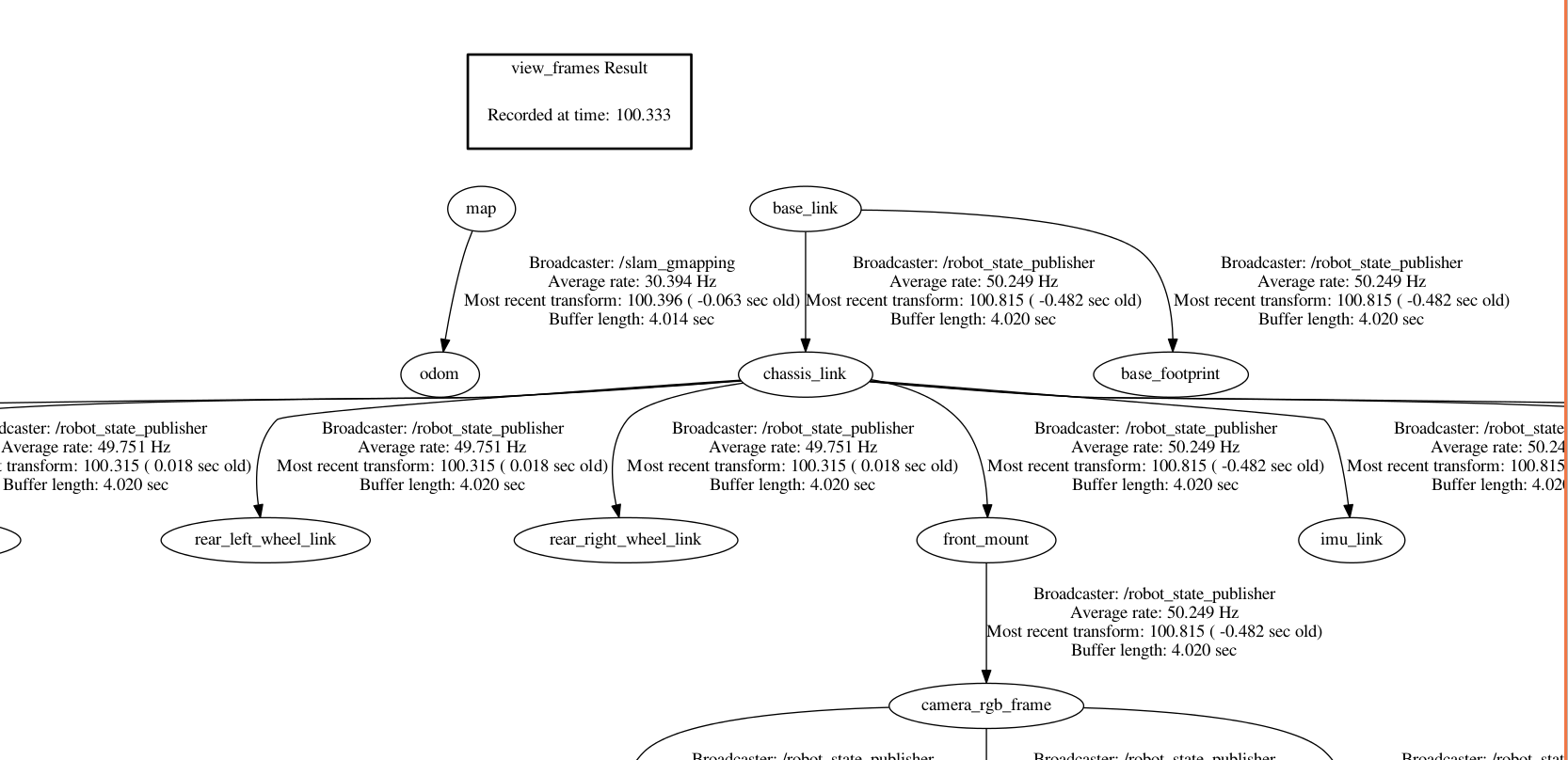 I am uploading the screenshots of the tf on behalf of
I am uploading the screenshots of the tf on behalf of