
Strange behavior when using teb_local_planner on car (Many oscillations)

I have a hard time getting the planner to work with a real car. It seems the the planner is always kind of stuck and oscillating back and forth although backwards velocity is set to 0. (simulated in stage, real car cant go backwards) Don't know how the costmap size affects the planner here, but its a lot bigger than in the tutorial environments. Maybe I also have overtuned the params, but it also looks as if the planner doesn't take the model limits into account (acc limits)
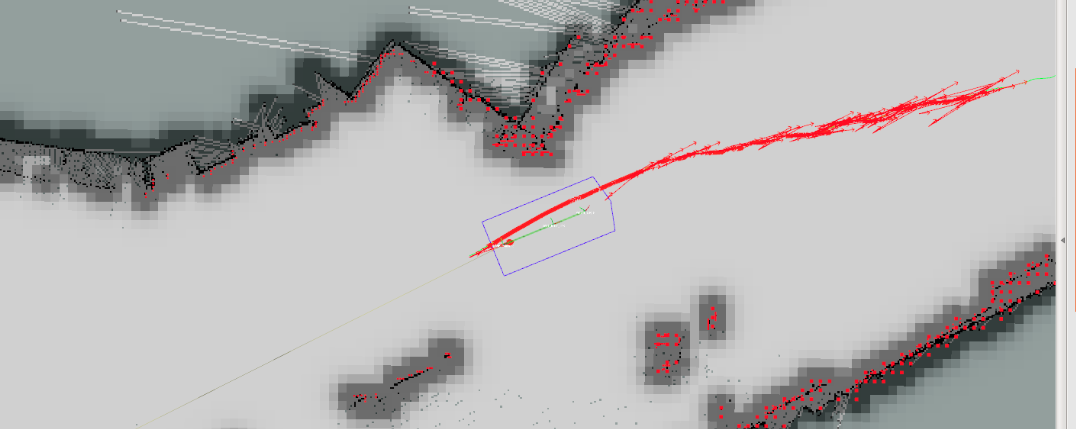
Here it looks like an easy to follow plan, but the planner does awful things:
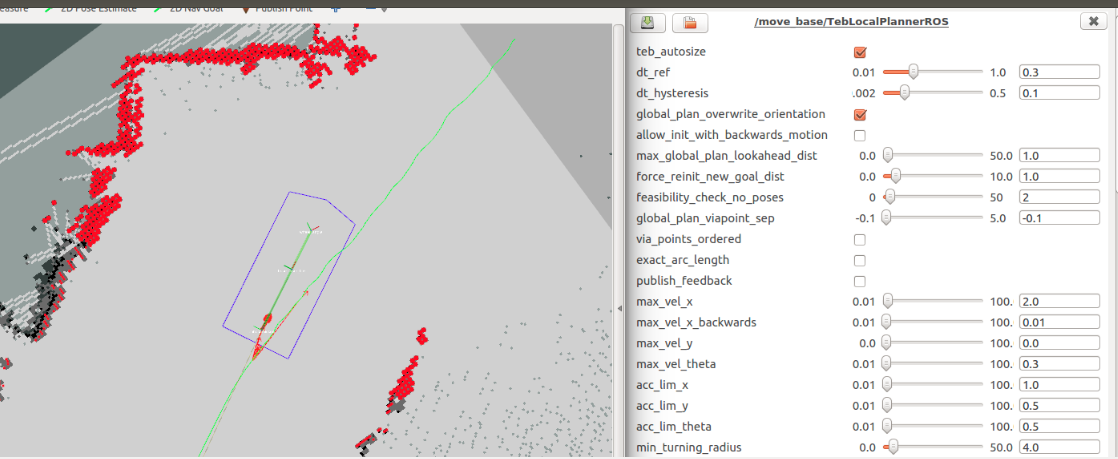
And this one (adjusting dt_ref doesn't seem to change anything):
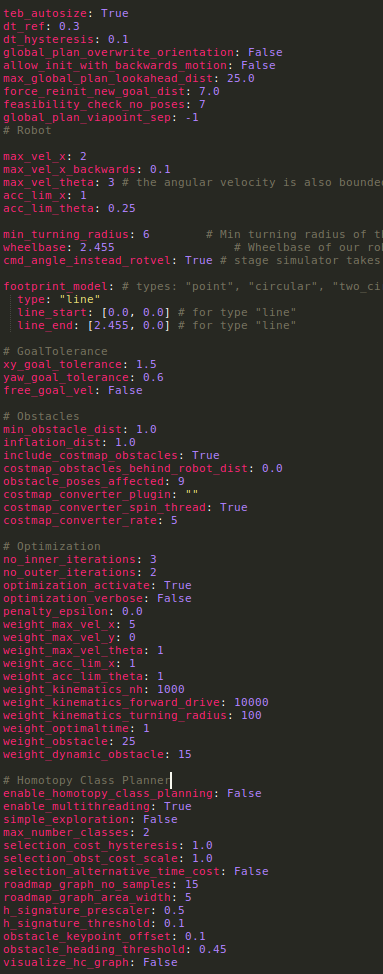
Params:
Maybe someone has some tips for me here.

if this is still relevant (6 month later), please try again with the newest version (I fixed a crucial bug which introduced oscillations) and tell me if the issues still occur. Note, never set vel/acc limits lower than param
penalty_epsilon.