
teb_local_planner compilation error
ROS:kinetic:
error:
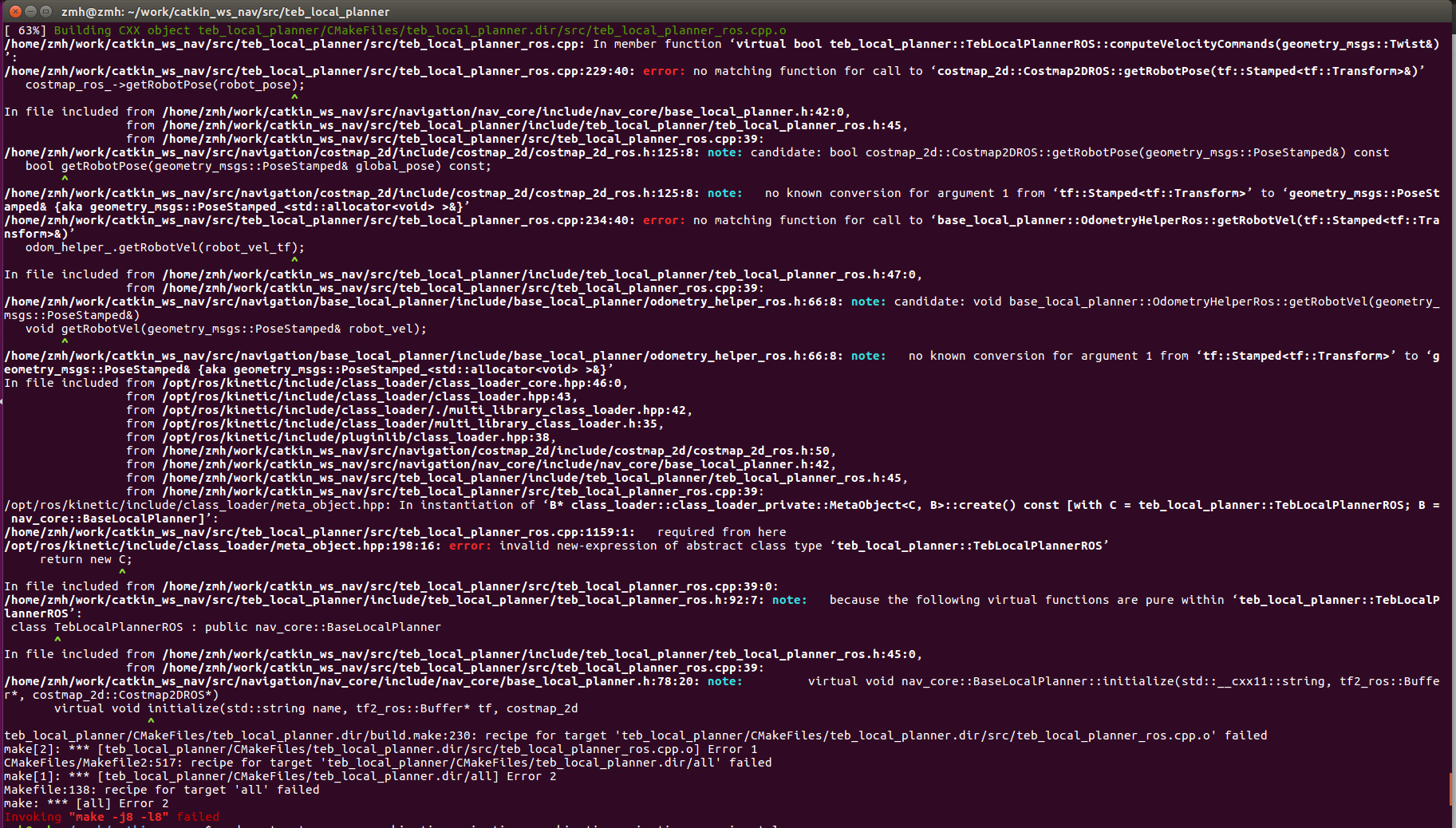
teb_local_planner_ros.cpp:229:40: error: no matching function for call to ‘costmap_2d::Costmap2DROS::getRobotPose(tf::Stampedtf::Transform&)’
costmap_ros_->getRobotPose(robot_pose);
/opt/ros/kinetic/include/class_loader/meta_object.hpp:198:16: error: invalid new-expression of abstract class type ‘teb_local_planner::TebLocalPlannerROS’
return new C;
add a comment

