
hector_mapping map issue
Hello!
I use hector_mapping to build map using odometry and scan data. Everything is ok but when I rotate my robot after several rotates the map shifts like this.
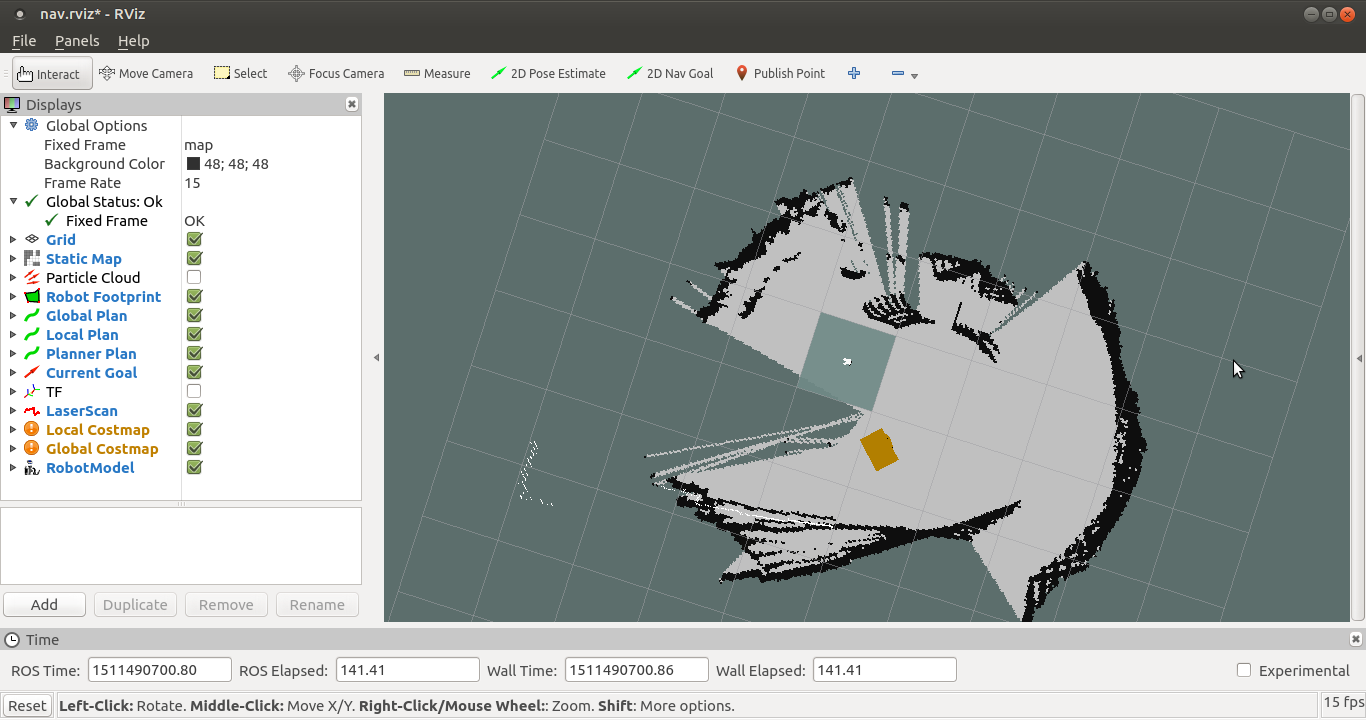 Looking at the way the robot moves on the map, I can assume that scanmatching does not work. Work only odometry.
Here is my launch file.
Looking at the way the robot moves on the map, I can assume that scanmatching does not work. Work only odometry.
Here is my launch file.
<launch>
<arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher"/> <arg name="base_frame" default="base_link"/> <arg name="odom_frame" default="odom"/> <arg name="pub_map_odom_transform" default="false"/> <arg name="scan_subscriber_queue_size" default="5"/> <arg name="scan_topic" default="scan"/> <arg name="map_size" default="2048"/>
<node pkg="tf" type="static_transform_publisher" name="base_footprint_123_base_link" args="0 0 0 0 0 0 /map /odom 100"/>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<param name="pub_map_scanmatch_transform " value="true"/>
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="true"/>
<param name="map_with_known_poses" value="true"/>
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.025"/>
<param name="map_size" value="$(arg map_size)"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5"/>
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.9" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="laser_max_dist" value = "3" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="$(arg scan_subscriber_queue_size)"/>
<param name="scan_topic" value="$(arg scan_topic)"/>
<!-- Debug parameters -->
<!--
<param name="output_timing" value="false"/>
<param name="pub_drawings" value="true"/>
<param name="pub_debug_output" value="true"/>
-->
<param name="tf_map_scanmatch_transform_frame_name" value="$(arg tf_map_scanmatch_transform_frame_name)" />
</node>
</launch>
What's problem?

Is there an update to this porblem?
I'm having a similar issue - any resolution?