
which topic should I pub to move robot in rviz and Gazebo?
Hi all. I'm trying to write some rviz plugin attached to a 6 dof robot which are designed to control the 6 individual axis seperately. So I need to know which topic do the Rviz and Gazebo listen to. I run rostopic list to find all the topic and here are the output:
/attached_collision_object
/clock
/collision_object
/execute_trajectory/cancel
/execute_trajectory/feedback
/execute_trajectory/goal
/execute_trajectory/result
/execute_trajectory/status
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/jakaUr/jaka_joint_controller/command
/jakaUr/jaka_joint_controller/follow_joint_trajectory/cancel
/jakaUr/jaka_joint_controller/follow_joint_trajectory/feedback
/jakaUr/jaka_joint_controller/follow_joint_trajectory/goal
/jakaUr/jaka_joint_controller/follow_joint_trajectory/result
/jakaUr/jaka_joint_controller/follow_joint_trajectory/status
/jakaUr/jaka_joint_controller/state
/jakaUr/joint_states
/joint_states
/move_group/cancel
/move_group/display_contacts
/move_group/display_planned_path
/move_group/feedback
/move_group/goal
/move_group/monitored_planning_scene
/move_group/ompl/parameter_descriptions
/move_group/ompl/parameter_updates
/move_group/plan_execution/parameter_descriptions
/move_group/plan_execution/parameter_updates
/move_group/planning_scene_monitor/parameter_descriptions
/move_group/planning_scene_monitor/parameter_updates
/move_group/result
/move_group/sense_for_plan/parameter_descriptions
/move_group/sense_for_plan/parameter_updates
/move_group/status
/move_group/trajectory_execution/parameter_descriptions
/move_group/trajectory_execution/parameter_updates
/pickup/cancel
/pickup/feedback
/pickup/goal
/pickup/result
/pickup/status
/place/cancel
/place/feedback
/place/goal
/place/result
/place/status
/planning_scene
/planning_scene_world
/recognized_object_array
/rosout
/rosout_agg
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full
/rviz_shantengfei_pc_28509_8920340868071791588/motionplanning_planning_scene_monitor/parameter_descriptions
/rviz_shantengfei_pc_28509_8920340868071791588/motionplanning_planning_scene_monitor/parameter_updates
/tf
/tf_static
/trajectory_execution_event
and run rosrun rqt_graph rqt_graph to find the connection of whole package.the picture is the output.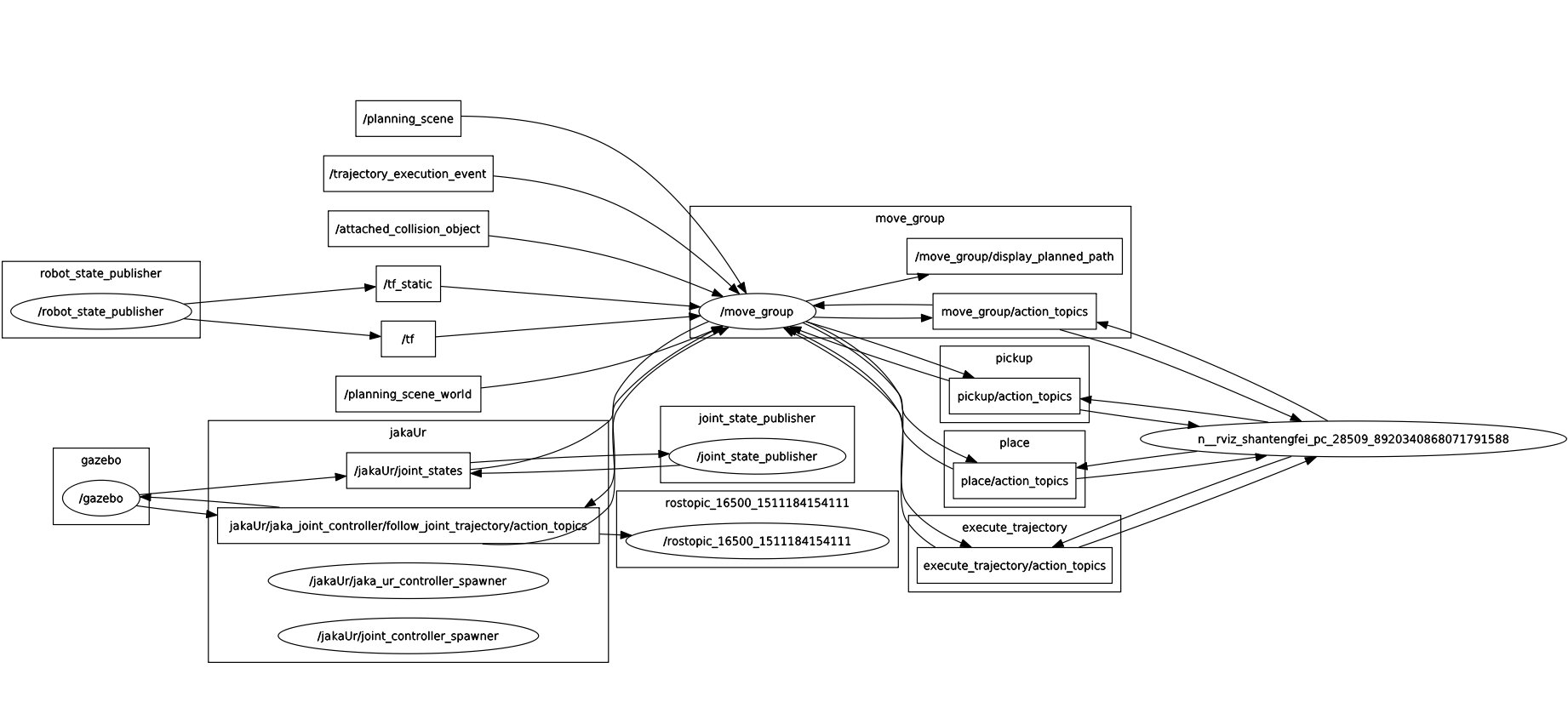
I tried to publish some topic but I found it was hard to publish data mannually in some topic like /jakaUr/jaka_joint_controller/follow_joint_trajectory/goal. Could someone tell me how to find the correct topic that I can publish to control robot in Rviz and Gazebo move that I can wirte mannual control Rviz plugin? Thanks!
add a comment
