
move_base functionality
Where can I find a move_base functionality scheme?
I want something more detailed than this
I did this scheme
this is more complete
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Where can I find a move_base functionality scheme?
I want something more detailed than this
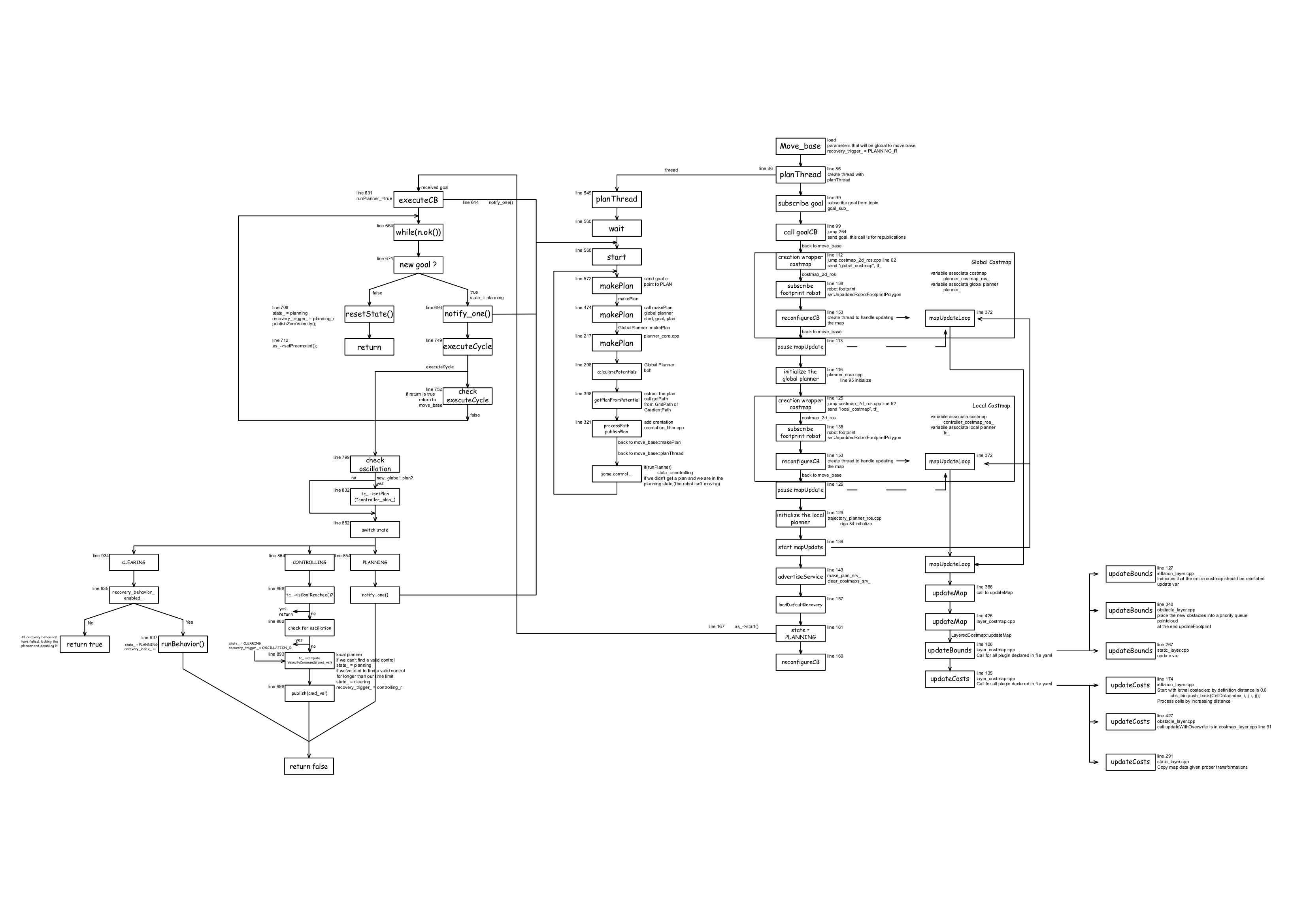
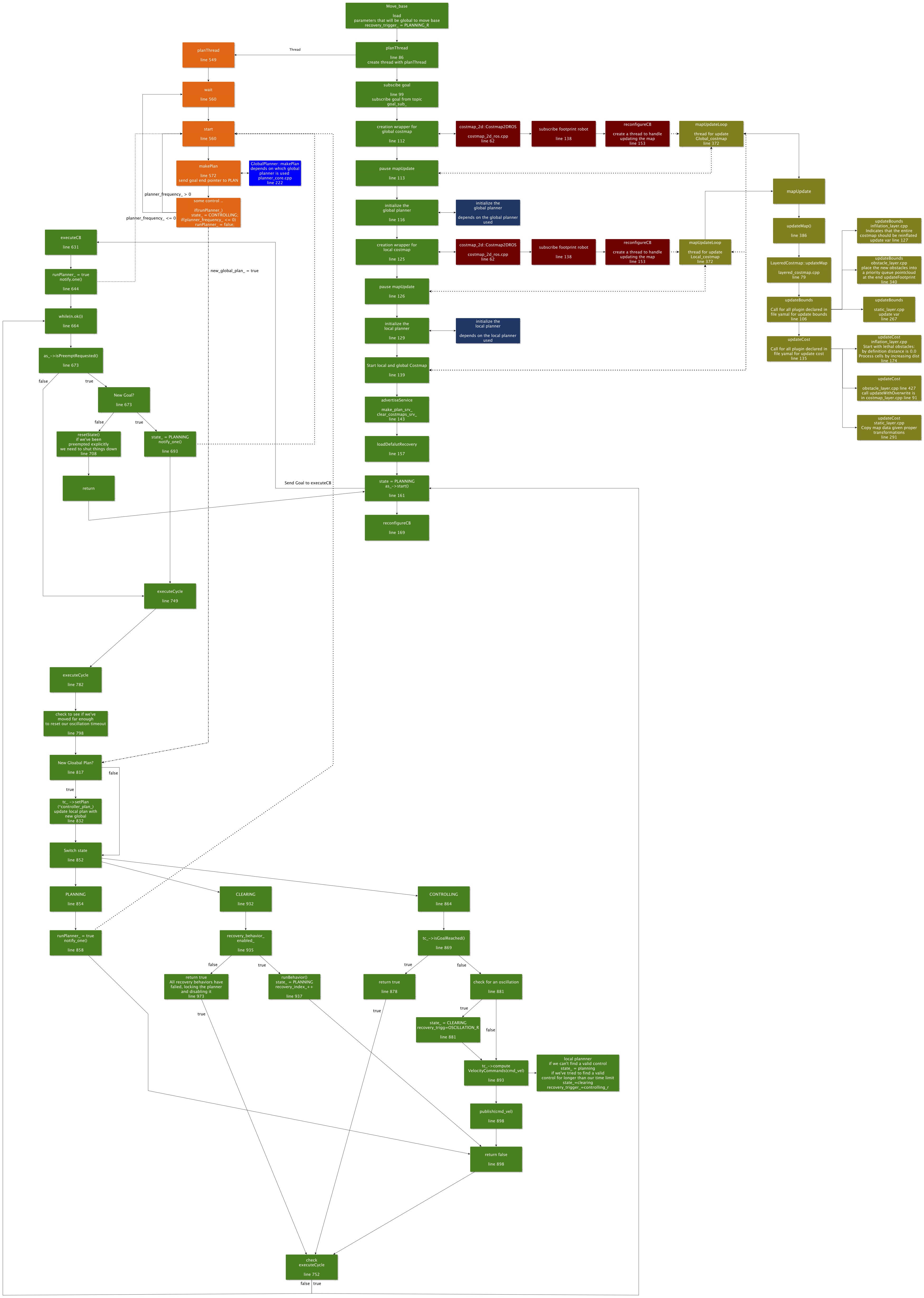
I did this scheme
this is more complete
It's all on the documentation here: http://wiki.ros.org/move_base
The scheme itself (taken from there) would be: https://imgur.com/a/AObhV (Can't upload images yet.)
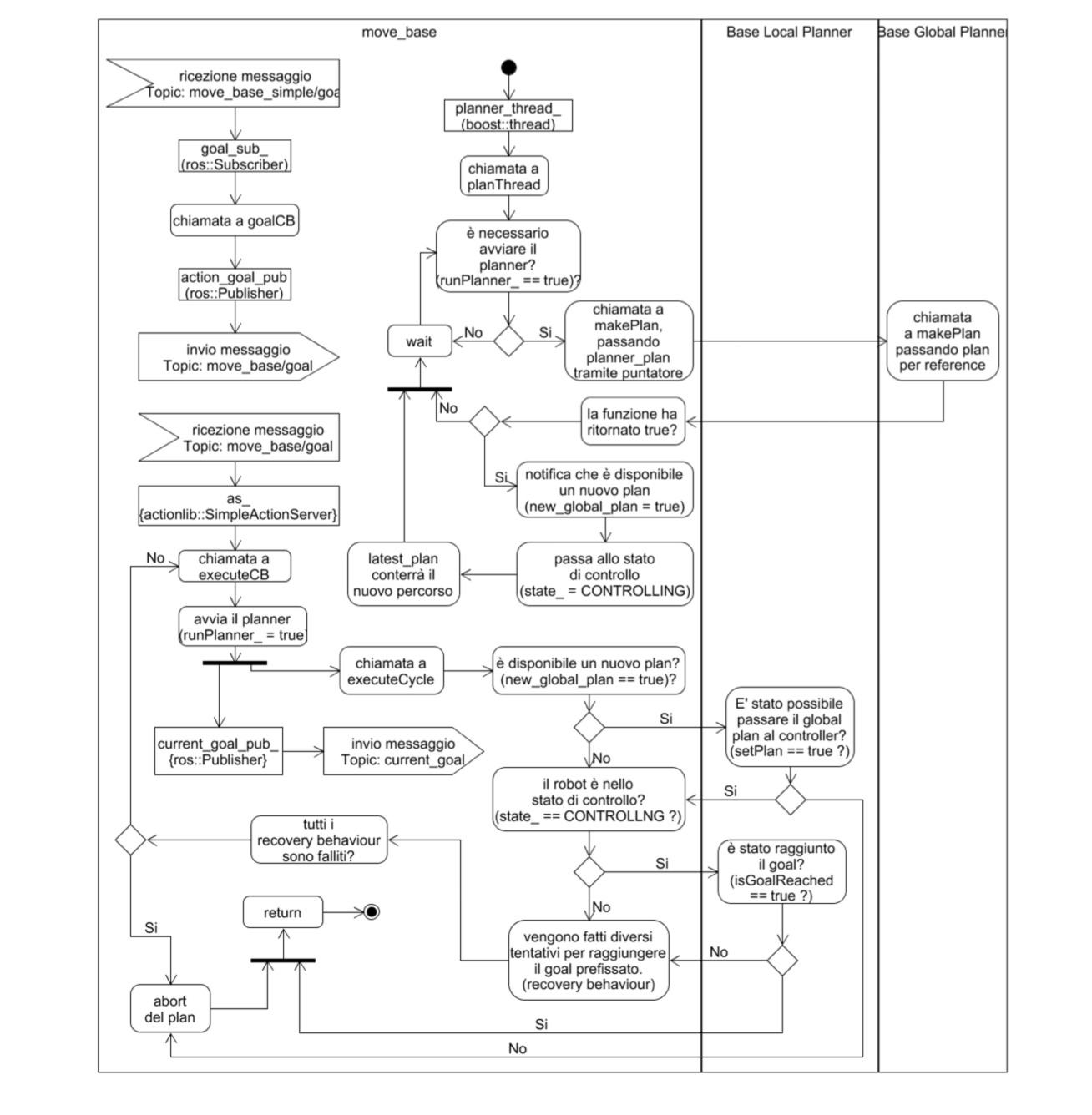
ok but I won't something more detailed like this https://www.dropbox.com/s/3k643xqv6l5n996/move_base_schema.png?dl=0
@pietrocolombo: that is a flow chart diagram, which is something different from a 'functionality scheme' (which is a bit ambiguous in any case).
I made a new scheme and edited the original answer. Does anyone of you know how to include this scheme in the official wiki page?
@pietrocolombo: Please don't use answers to update your question. Please just update your question.
Well, even though the scheme should be included in the proper wiki page rather than here, now we have one answer to the original question.. "Where can I find a move_base scheme"? Here ... ;-)
Asked: 2017-10-30 11:02:59 -0500
Seen: 647 times
Last updated: Nov 14 '17
/map not connecting to tf links for loading multiple robots in rviz
/move_base died when running rbx1 simulation
move_base crashes when ClearCostmapRecovery tries to clear inflation layer
Using wheel encoders and IMU with robot_localization
Using the Move_base package with only a local planner
sending a sequence of goals to move_base
which is the best local planner for autonomous mobile robot to work at speed of 1 m/s ? [closed]
GPS waypoints with navsat_transform_node + move_base + navigation stack
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

{kind=link}
Could you please attach the image you linked to in your comment to your question directly? I've give you enough karma to do so.