
min_obstacle_height for obstacle costmap

This is my urdf xacrp for mounting and rotating the lidar
<!-- Vertical Lidar Left-->
<xacro:hokuyo_utm30lx name="vert_left_laser" parent="lidar_block1" ros_topic="left_scan"
update_rate="5" ray_count="100" min_angle="-90" max_angle="90" >
<origin xyz="${0} ${0.090/2} ${lblength}" rpy="-1.5708 0 0" />
</xacro:hokuyo_utm30lx>
My common costmap params for the vertical layer.
vertical_obstacle_layer:
enabled: true
obstacle_range: 5.0
raytrace_range: 30.0
max_obstacle_height: 1.0
min_obstacle_height: 0.1
inflation_radius: 0.5
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: vert_left_laser_frame, data_type: LaserScan, topic: left_scan, marking: true, clearing: true, inf_is_valid: true}
My local costmap params.
local_costmap:
global_frame: /odom
robot_base_frame: base_footprint
update_frequency: 3.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
transform_tolerance: 5.0
plugins:
- {name: vertical_obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
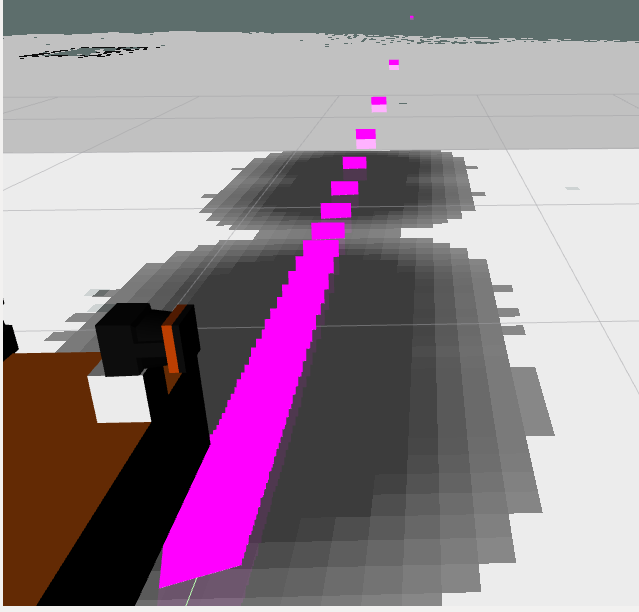
As you can see in the picture, the floor that being scanned by the laser get inserted as obstacle to the costmap. I have already set the parameters of max_obstacle_height to 1.0 and min_obstacle_height to 0.1. I wanted to add the obstacle only when it is above ground level and is within 5m range. What could possibly goes wrong here?

Are you sure its the laser? The sensor data looks like a straight line but the costmap doesn't reflect that.
Yes i am sure it is the laser. This was because my robot odom is drifting a little in gazebo. I uploaded a new one to prevent confusion to others now.
Anyway i think my question is similar with https://answers.ros.org/question/2572... .
How high are the points? Is there any value of min_obstacle_height that eliminates them?
Setting the min_obstacle_height under sensor parameter will eliminates those obstacle on the ground plane. The purpose of having vertical lidar is to improve the obstacle avoidance capability when the obstacle is not in the same height of the horizontal lidar plane.
I dont think VoxelCostmapPlugin is suitable for vertical lidar. I think VoxelCostmapPlugin is only intended for horizontal lidar due to how it codes the raytrace and clear obstacle method? I am still in the midst of figuring how to use the vertical lidar to contribute to my local costmap.
For now, i created my own plugin which always use a new voxelgrid on every vertical scan. This is bad as it "forgets" the obstacle when the obstacle is out of its scanning plane. Do you have any advice/experience on using vertical lidar to contribute to a 2d costmap?
I will open another thread to discuss when i am able to at least try out some method first.