
moveit setup show no active joints or end effectors found for group ''
I forked ROS packages from ROS-I/universal_robot. And I follow Moveit Setup Assistant Tutorial. After setup Moveit config, I got a demo.launch file, then
roslaunch ur5_grasp_moveit_config demo.launch
I got the following errors, and the rviz did not show any interactive markers.
[ INFO] [1505957647.779692210]: Fake controller 'fake_ur5manipulator_controller' with joints [ shoulder_pan_joint shoulder_lift_joint elbow_joint wrist_1_joint wrist_2_joint wrist_3_joint ]
[ INFO] [1505957647.788025775]: Fake controller 'fake_gripper_controller' with joints [ bh_j11_joint bh_j12_joint bh_j22_joint bh_j32_joint ]
[ INFO] [1505957647.796457498]: Fake controller 'fake_moveit_ee_controller' with joints [ ]
[ INFO] [1505957647.807434551]: Returned 3 controllers in list
[ INFO] [1505956629.889136115]: Loading robot model 'ur5'...
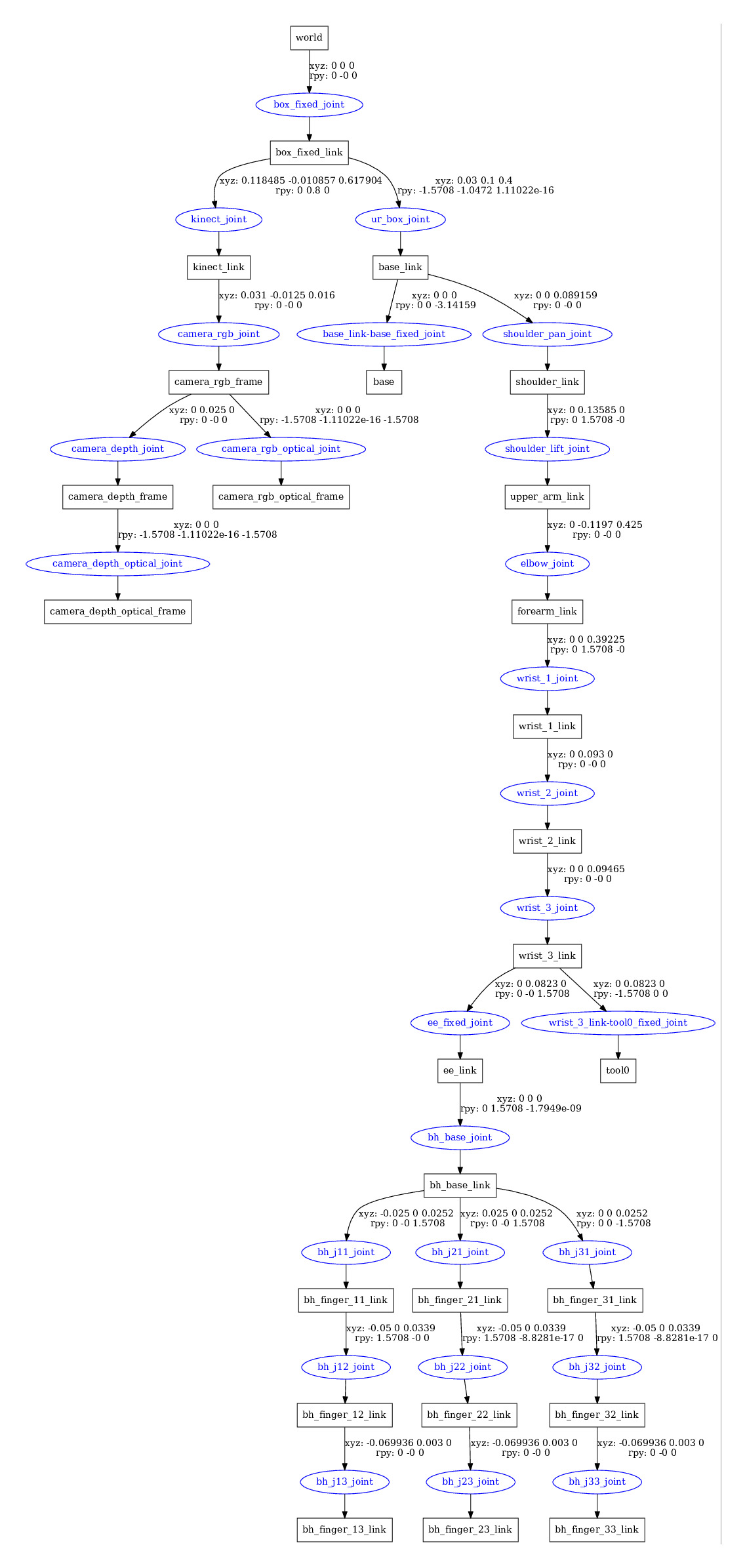
[ WARN] [1505956629.889226914]: Skipping virtual joint 'virtual_joint' because its child frame 'box_fixed_link' does not match the URDF frame 'world'
[ INFO] [1505956631.143209340]: No active joints or end effectors found for group ''. Make sure you have defined an end effector in your SRDF file and that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1505956631.143508371]: No active joints or end effectors found for group 'gripper'. Make sure you have defined an end effector in your SRDF file and that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1505956631.212833955]: No active joints or end effectors found for group 'gripper'. Make sure you have defined an end effector in your SRDF file and that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1505956631.213958002]: Constructing new MoveGroup connection for group 'gripper' in namespace ''
[ INFO] [1505956633.034567194]: Ready to take commands for planning group gripper.
It seems that I got a group named '', it's so strange!
I make a robot using a fixed box as the human-like truck, a UR5 robot arm and a Kinect as human-like eyes.
My URDF model please see here
My SRDF file is here.
And I can't find a way to debug it.
My system configuration:
Ubuntu: 16.04
ROS: kinetic
Moveit: 0.9.9-Alpha
Any help will be appreciated!

{kind=link}
I don't see the error list. Are you able to post a link to your actual URDF?
please see my post here https://github.com/jacknlliu/developm... .
@Jack Liu: please include all images directly in your post. I've given you enough karma to do that. Off-site images will disappear at some point in the future, decreasing the value of this question (and it's answers) for future readers.
Thanks.
See if my answer here solves your problem