
realsense SR300 detect object much closer

i use SR300 on my robot for obstacle avoidance
my ros is indigo and use official package for the camera
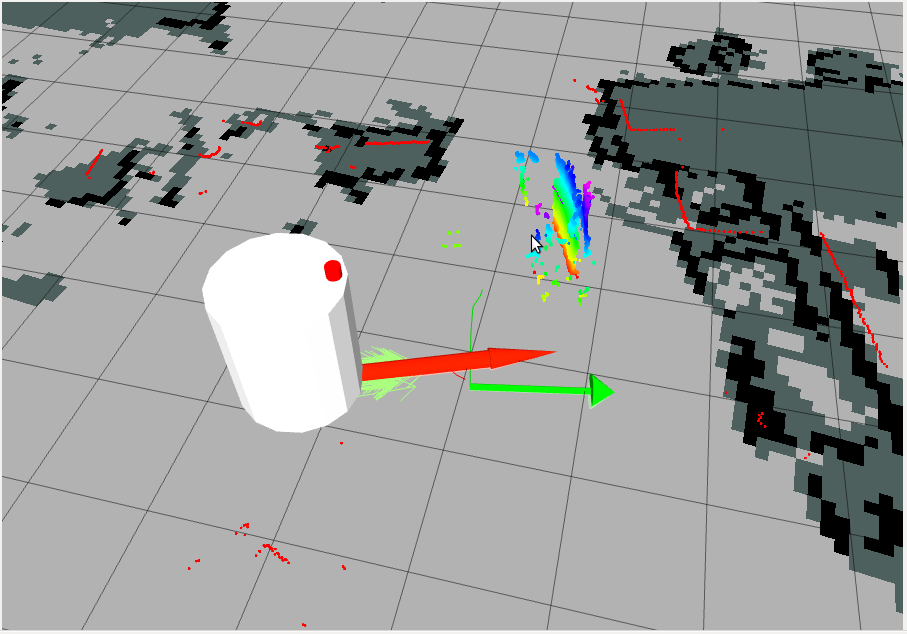
i put the robot afront of a wall, at first the camera detect the wall just as my lidar detected, the distance are almost the same
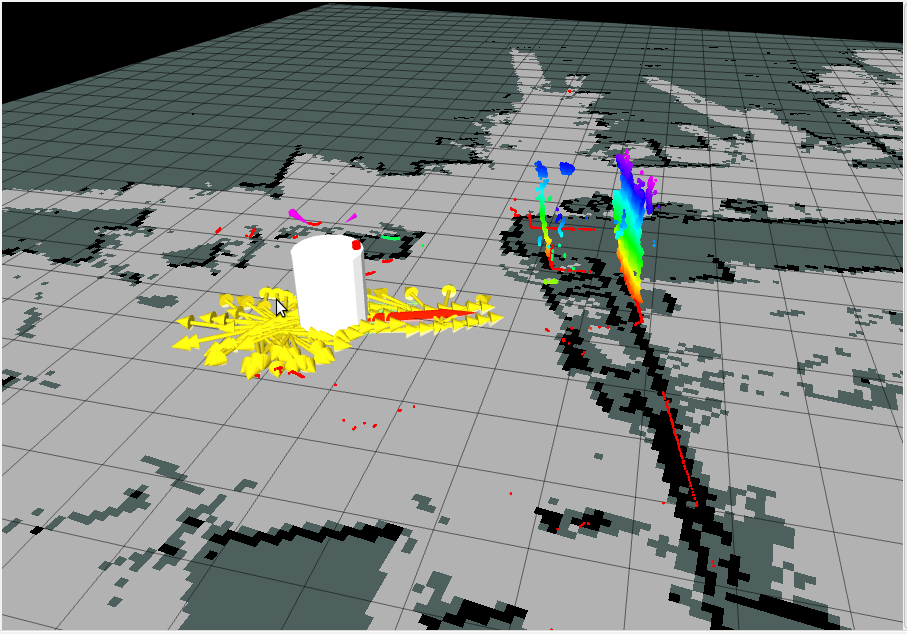
but waite a little longer time , the camera detect the wall much closer than the lidar detected, as show below
after i restart the launch file, it works fine again.
by the way i keep all the parameters as default
much thanks anyone can help

Hi, There is a talk about that on Intel's forum : Depth Accuracy and reliability across different f200 sensors , There is a drift in time for the measurement, but your drift seem to go in the other way