
Aruco_mapping ROS package - getting the pose of markers
I am using the aruco mapping package. As you can see in the picture in the link at the bottom, when i run the aruco poses topic, the aruco marker's position is constant and the camera's pose i changing. How do i get the pose of the marker instead?
Aruco mapping also has a topic named Txyz values which prints just the x,y.z values of each markers but not the pose. Does anyone know if there is a way to get the pose as well?
Or Does anyone know if there is any other package or different method to get the x,y and pose values of the aruco markers?
Here is a link to the screenshot. ( https://drive.google.com/open?id=0B2i... )
Thanks in advance.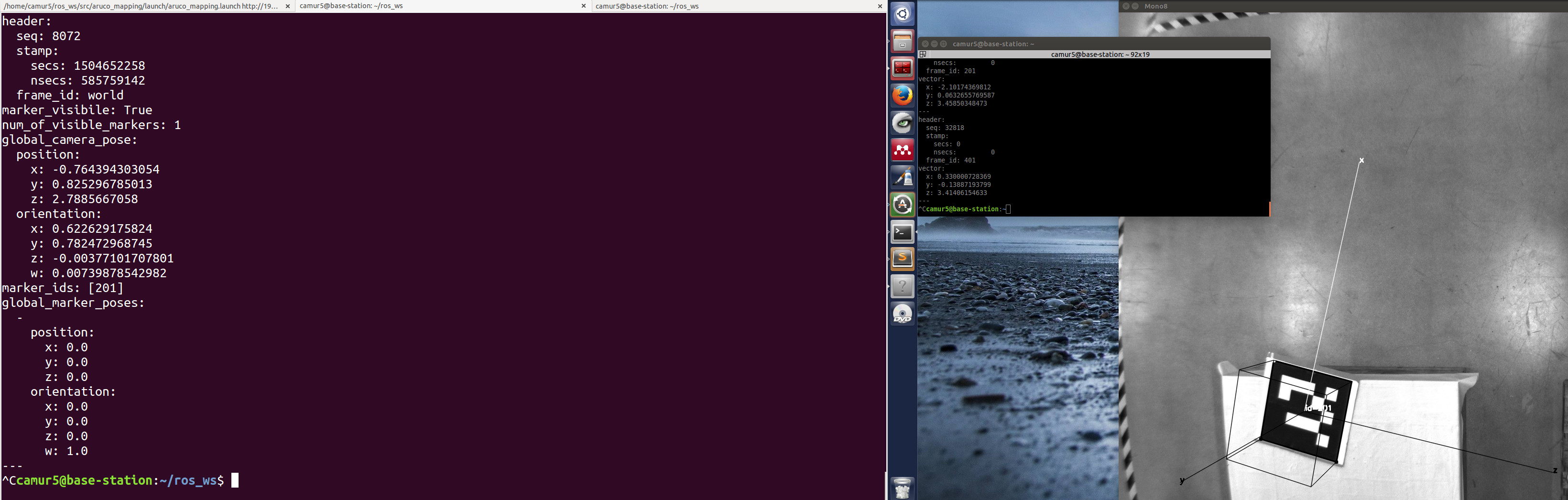

Please attach your screenshot to the post directly instead of hosting it externally. I've given you enough karma to do that.
Thanks. Attached the screenshot.